
Abstract
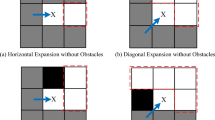
Aiming at the shortcomings of traditional A* algorithm in 3D global path planning such as inefficiency and large computation, an A* optimization algorithm based on adaptive expansion convolution is proposed to realize UAV path planning. First, based on the idea of expansion convolution, the traditional A* algorithm is optimized to improve the search efficiency by improving the search step length and reducing the number of nodes needed to select the extended nodes in path planning; adding a weight factor to the cost function to select the appropriate weight of the cost function by keeping the principle of optimal path length while accelerating the planning speed to improve the planning speed of the algorithm; finally, using path pruning to further optimize the paths and reduce the problems of path redundancy. The simulation analysis results show that compared with the traditional A* algorithm, the improved algorithm in this paper reduces the number of extended nodes and shortens the planning time.











Similar content being viewed by others

Explore related subjects
Discover the latest articles and news from researchers in related subjects, suggested using machine learning.Code or data availability
This work does not content any code or data publicly available.
References
Aldahhan M, Schmidt K W. Path Planning Based on Voronoi Diagram and PRM for Omnidirectional Mobile Robots//DTSS2019.2019.
Zhao P, Chang Y, Wu W et al (2023) Dynamic RRT: fast feasible path planning in randomly distributed obstacle environments. J Intell Robot Syst 107:48. https://doi.org/10.1007/s10846-023-01823-4
Ferguson D, Anthony S et al (2006) Using interpolation to improve path planning: The Field D* algorithm. J Field Robotics. https://doi.org/10.1002/rob.20109
Wang X, Liu J, Peng H et al (2022) A simultaneous planning and control method integrating APF and MPC to solve autonomous navigation for USVs in unknown environments. J Intell Robot Syst 105:36. https://doi.org/10.1007/s10846-022-01663-8
Brütting J, Senatore G, Fivet C (2022) Correction: MILP-based discrete sizing and topology optimization of truss structures: new formulation and benchmarking. Struct Multidisc Optim 65:341. https://doi.org/10.1007/s00158-022-03452-1
Fischer L , Nedel L P (2011) Semi-automatic navigation on 3D triangle meshes using BVP based path-planning//24th SIBGRAPI conference on graphics, patterns and images, Sibgrapi 2011, Alagoas, Maceió, Brazil, August 28–31, 2011.IEEE. DOI:https://doi.org/10.1109/SIBGRAPI.2011.30.
Honglun W, Jianfa W, Peng Y. (2018) UAV three-dimensional path planning based on interfered fluid dynamical system: methodology and application. unmanned systems technology
Okwu MO, Tartibu LK, Ant Colony (2021) Algorithm. In: metaheuristic optimization: nature-inspired algorithms swarm and computational intelligence, Theory and applications. studies in computational intelligence, vol 927. Springer, Cham. https://doi.org/10.1007/978-3-030-61111-8_4.
Shen J, Shi J, Xiong L (2016) A Route planning method for underwater terrain aided positioning based on gray wolf optimization algorithm. In: et al. intelligent data engineering and automated learning – IDEAL 2016. IDEAL 2016. Lecture notes in computer science, vol 9937. Springer, Cham. https://doi.org/10.1007/978-3-319-46257-8_14.
Okwu MO, Tartibu LK (2021). Bat Algorithm. In: metaheuristic optimization: nature-inspired algorithms swarm and computational intelligence, theory and applications. studies in computational intelligence, vol 927. Springer, Cham. https://doi.org/10.1007/978-3-030-61111-8_8.
Likhachev M, Ferguson D, Gordon G, et al. (2005) Anytime Dynamic A*: An anytime, replanning algorithm// fifteenth international conference on international conference on automated planning & scheduling. AAAI Press
Wang J, Meng QH, Khatib OEB-RRT (2020) Optimal motion planning for mobile robots. IEEE Trans Autom Sci Eng 17(4):2063–2073
Junwei Z. Jianjun Z (2014) Path planning of multi-UAVs concealment attack based on new a* method//sixth international conference on intelligent human-machine systems & cybernetics. IEEE DOI:https://doi.org/10.1109/IHMSC.2014.198.
Xu Y, Yue W, Su K (2009) The BDD-Based Dynamic A* Algorithm for Real-Time Replanning. Springer-Verlag, Cham
Edison E, Shima T (2011) Integrated task assignment and path optimization for cooperating uninhabited aerial vehicles using genetic algorithms. Comput Oper Res 38(1):340–356. https://doi.org/10.1016/j.cor.2010.06.001
Xia B (2022) Automatic parking path optimization based on immune moth flame algorithm for intelligent vehicles. Symmetry. https://doi.org/10.3390/sym14091923
Hart PE, Nilsson NJ, Raphael B (1972) A formal basis for the heuristic determination of minimum cost paths. IEEE Trans Syst Sci Cybern 4(2):28–29. https://doi.org/10.1145/1056777.1056779
Wang YF, Li Y, Wang JQ, Lv HF (2024) An optical flow estimation method based on multiscale anisotropic convolution. Appl Intell 54:398-413. https://doi.org/10.1007/s10489-023-05131-0
Strubell E, Verga P, Belanger D, et al. (2017) Fast and accurate entity recognition with iterated dilated convolutions. DOI https://doi.org/10.48550/arXiv.1702.02098
Wang Xh, Liu Xh, Wang Yc, Liang Sp (2020) Research on Path Planning of Mobile Robot Based on Improved A* Algorithm. In: Chien CF, Qi E, Dou R (eds) IE&EM 2019. Springer, Singapore
Kim MH, Lee HM, Wei Y, Lee MC (2012) A Study of New Path Planning Algorithm Using Extended A* Algorithm with Survivability. In: Su CY, Rakheja S, Liu H (eds) Intelligent Robotics and Applications ICIRA 2012 Lecture Notes in Computer Science. Berlin, Heidelberg, Springer
Acknowledgements
Thanks to the Science and Technology Development Plan of Jilin Province for help in identifying collaborators for this work.
Funding
This study was funded by Science and Technology Development Plan of Jilin Province (20200401090GX and 20230101174JC).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare they have no conflict of interest.
Ethical approval
This is an observational study that no ethical approval is required.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Xu, Y., Li, Y., Tai, Y. et al. A* algorithm based on adaptive expansion convolution for unmanned aerial vehicle path planning. Intel Serv Robotics 17, 521–531 (2024). https://doi.org/10.1007/s11370-024-00536-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11370-024-00536-3