
Abstract
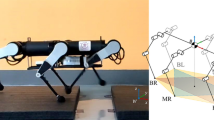
Compared to wheeled and tracked robots, hexapod robots have higher adaptability and higher flexibility in complex terrains. With various gaits, hexapod robots can fulfill different needs better. Existing researches mainly focused on three common gaits, they are single-leg swing gait, wave gait, and tripod gait. Instead of directly planning gaits with swarm intelligence algorithms (SIA), a gait planning method for hexapod robots named finite incremental state machine (FISM) is proposed. FISM focuses on four incremental states between two adjacent gaits of the robot, which greatly reduces the complexity of the gait planning algorithm so that gait planning with SIA is simplified to set the optimal transfer conditions of FISM. In addition, after comparing five optimization algorithms, the whale optimization algorithm (WOA) can set the optimal transfer conditions of FISM. The computer simulation shows WOA-FISM can plan various gaits, finally, a real robot test verifies the effectiveness of various gaits.


















Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Wan CLH, Zhan ZYP, Yan LDJ, Ni Y, Jian J (2022) Review of bionic crawling micro-robots. J Intell Rob Syst 105(3):56
Gon Y, Su G, Nai A, Bidwa ACR, Grezma J, Sartorett G, Daltori KA (2023) Legged robots for object manipulation: a review. Front Mech Eng 9:1142421–1142439. https://doi.org/10.3389/fmech.2023.1142421
Widanag KN, De Silv MJ, Lalitharatn TD, Bul AM, Gopur R (2023) Developments in circular external fixators: a review. Injury 54(12):111157
Se T, Ry S, Wo JH, Ki Y, Ki HS (2023) Stair-climbing robots: a review on mechanism sensing and performance evaluation. IEEE Access 11(5):60539–60561. https://doi.org/10.1109/ACCESS.2023.3286871
Mihai Duguleana GM (2016) Neural networks based reinforcement learning for mobile robots obstacle avoidance. Expert Syst Appl 62:104–115
žlajpah L (2008) Simulation in robotics. Math Comput Simul 79:879–897
Akdağ M, Karagülle LMH (2012) An integrated approach for simulation of mechatronic systems applied to a hexapod robot. Math Comput Simul 82:818–835
Nygaar TF, Marti CP, Torrese J, Glett K, Howar D (2021) Real-world embodied AI through a morphologically adaptive quadruped robot. Nat Mach Intell 3(5):410–419
Institut: Beihang Universit, C. Beijing 100191 (2017) Effects of pendular waist on gecko’s climbing: Dynamic gait analytical model and bio-inspired robot. J Bionic Eng 14:191–201
Shengchang F, Shuyuan S, Xuan W, Xiaojie W (2023) A walking and climbing quadruped robot capable of ground-wall transition: design, mobility analysis and gait planning. Intel Serv Robot 16:431–451
Tho M, Manoonpon P (2019) A fast online frequency adaptation mechanism for CPG-based robot motion control. IEEE Robot Autom Lett 4(4):3324–3331. https://doi.org/10.1109/LRA.2019.2926660
Fu C (2009) A gait planning method applied to hexapod biomimetic robot locomotion. High Tech Commun Engl 1:7–12
Schuman E, Smit-Anseeu N, Zaytse P, Gleaso R, Shorte KA, Rem CD (2019) Effects of foot stiffness and damping on walking robot performance. In: International conference on robotics and automation (ICRA), pp 3698–3704. https://doi.org/10.1109/ICRA.2019.8794050
Hongbo Z, Minzhou Lu TMJZTLFG (2016) Energy-efficient bio-inspired gait planning and control for biped robot based on human locomotion analysis. J Bionic Eng 13:271–282
Luneckas T (2011) Analysis of hexapod robot locomotion. Mokslas Lietuvos Ateitis 2:36–39
Li R, Meng H, Bai S, Yao Y, Zhang J (2018) Stability and gait planning of 3-UPU hexapod walking robot. Robotics 7:48. https://doi.org/10.3390/robotics7030048
Zheng Zhongyuan ZYWG (2023) Research on piezoelectric driving microminiature three-legged crawling robot. J Bionic Eng 20:1481–1492
Hu Pingzh LZ (2021) Gait planning of quadruped robots based on improved ant colony algorithm. Comput Eng Sci 43:2253–2262
Li Y, Chen Z, Wu C, Mao H, Sun P (2023) A hierarchical framework for quadruped robots gait planning based on DDPG. Biomimetics 8:382. https://doi.org/10.3390/biomimetics8050382
Wang C, Chen X, Yu Z, Dong Y, Chen K, Gergondet P (2023) Robust humanoid robot vehicle ingress with a finite state machine integrated with deep reinforcement learning
Yan Zhepin WYCSWH, Jiny Y (2023) A novel reinforcement learning based tuna swarm optimization algorithm for autonomous underwater vehicle path planning. Math Comput Simul 209:55–86
Zhang We YHTY, Qingshu G (2022) CPG modulates the omnidirectional motion of a hexapod robot in unstructured terrain. J Bionic Eng 20:558–567
Wang R, Powell N (2020) Hybrid gait planning of a hexapod robot. Mod Electron Technol 4:11–16
Wang B, Zhang K, Yang X, Cui X (2020) The gait planning of hexapod robot based on CPG with feedback. Int J Adv Robot Syst. https://doi.org/10.1177/1729881420930503
Li Y, Fa X, Din L, Wan J, Li T, Ga H (2020) Fault-tolerant tripod gait planning and verification of a hexapod robot. Appl Sci 10(8):2959
Yo B, Fa Y, Li D (2022) Fault-tolerant motion planning for a hexapod robot with single-leg failure using a foot force control method. Int J Adv Robot Syst 19(5):17298806221121070
Wang Y, Tian Yan GYWH (2024) Active torque-based gait adjustment multi-level control strategy for lower limb patient-exoskeleton coupling system in rehabilitation training. Math Comput Simul 215:357–381
Chen Z, Wang S, Wang J, Xu K, Lei T, Zhang H, Wang X, Liu D, Si J (2021) Control strategy of stable walking for a hexapod wheel-legged robot. ISA Trans 108:367–380
Nogueira HS, Oliveira FG, Pio JL (2021) Discrete movement control of a bio-inspired multi-legged robot. In: 2021 Latin American robotics symposium (LARS), 2021 Brazilian symposium on robotics (SBR), and 2021 Workshop on robotics in education (WRE), pp 174–179. https://doi.org/10.1109/LARS/SBR/WRE54079.2021.9605370
Fu C, Xizhe Z, Jihong Y, Jie Z (2010) A control structure for the autonomous locomotion on rough terrain with a hexapod robot. High Technol Lett 16(3):311–317
Lian J, Hui G (2024) Human evolutionary optimization algorithm. Expert Syst Appl 241:122638
Wan K, Zha H, Men F, Zhan X (2023) Research on the jumping control methods of a quadruped robot that imitates animals. Biomimetics 8(1):36–52
Su Y, Zon C, Pancher F, Che T, Luet TC (2023) Design of topology optimized compliant legs for bio-inspired quadruped robots. Sci Rep 13(1):4875
Hou X, Xin L, Fu Y, Na Z, Gao G, Liu Y, Xu Q, Zhao P, Yan G, Su Y, Cao K (2023) A self-powered biomimetic mouse whisker sensor (BMWS) aiming at terrestrial and space objects perception. Nano Energy 118:109034
Wang X, Fu H, Deng G, Tang K, Chen C, Liu C (2024) Research on motion planning of hexapod robots based on DRL and free gait. J Syst Simul. https://doi.org/10.16182/j.issn1004731x.joss.22-1220
Wang X, Fu H, Deng G, Liu C, Tang K, Chen C (2023) Hierarchical free gait motion planning for hexapod robots using deep reinforcement learning. IEEE Trans Ind Inform 19(11):10901–10912. https://doi.org/10.1109/TII.2023.3240758
Bhardwa G, Dasgupt S, Sukavana N, Balasubramania R (2023) Soft soil gait planning and control for biped robot using deep deterministic policy gradient approach. arXiv preprint arXiv:2306.08063
Wang X, Fu H, Deng G, Liu C, Tang K, Chen C (2023) Hierarchical free gait motion planning for hexapod robots using deep reinforcement learning. IEEE Trans Ind Inform 19(11):10901–10912. https://doi.org/10.1109/TII.2023.3240758
Ros JD, Mohanaprakas T, KrishnaRa M, Diviyasr S (2023) Designing a biped robot’s gait using reinforcement learning’s-actor critic method. In: 2023 International conference on inventive computation technologies (ICICT). IEEE, pp 142–146
Ma F, Yan W, Chen L, Cui R (2022) CPG-based motion planning of hybrid underwater hexapod robot for wall climbing and transition. IEEE Robot Autom Lett 7(4):12299–12306. https://doi.org/10.1109/LRA.2022.3216233
Zhan W, Gon Q, Yan H, Tan Y (2023) CPG modulates the omnidirectional motion of a hexapod robot in unstructured terrain. J Bionic Eng 20(2):558–567
Hülako Halit YO (2020) Control of three-axis manipulator placed on heavy-duty pentapod robot. Simul Model Pract Theory 108:102264
Ome E, Riad Z, Amu A-Y, Issa B, Fad A (2020) Modeling of a biped robot for investigating foot drop using MATLAB/Simulink. Simul Model Pract Theory 98:101972
Luneckas M, Luneckas T, Udris D, Plonis D, Maskeliunas R, Damasevicius R (2019) Energy-efficient walking over irregular terrain: a case of hexapod robot. Metrol Meas Syst 26(4):645–660
Luneckas M, Luneckas T, Kriaučiūnas J, Udris D, Plonis D, Damaševičius R, Maskeliūnas R (2021) Hexapod robot gait switching for energy consumption and cost of transport management using heuristic algorithms. Appl Sci 11(3):1339
Luneckas M, Luneckas T, Udris D, Plonis D, Maskeliūnas R, Damaševičius R (2021) A hybrid tactile sensor-based obstacle overcoming method for hexapod walking robots. Intel Serv Robot 14:9–24
Zhao L, Jin Jie GJ (2021) Robust zeroing neural network for fixed-time kinematic control of wheeled mobile robot in noise-polluted environment. Math Comput Simul 185:289–307
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Hu, P., Zhang, M. & Wang, D. Woa-fism planning hexapod robot various gaits. Intel Serv Robotics 17, 963–979 (2024). https://doi.org/10.1007/s11370-024-00548-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11370-024-00548-z