
Abstract
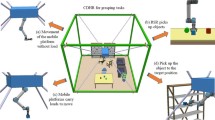
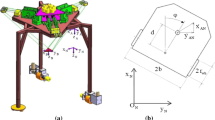
In this research, a new mobile cable robot with two moving platforms is designed and modeled which has a wide dynamic translational and rotational workspace for heavy and accurate product transportation. Today, it is desired to improve the cranes to achieve the highest stability and accuracy while heavier loads could be transported within the wider dexterous workspace. Considering the fact that the traditional cable robots are stationary, their related translational workspace is limited while the corresponding rotational range of the end effector is also bounded due to the positive tensile force limitation of the cables. Here, the cable robot is mounted on a mobile chassis to increase its translational workspace, while its end effector is promoted to a dual stage, to improve its rotational movement. The proposed robot has fifteen degrees of freedom (DOFs) including three degrees of freedom related to the mobile chassis of the robot and twelve degrees of freedom corresponding to the two engaged moving platforms. The kinematics and kinetics of the proposed robot are extracted using the Lagrange approach. The correctness of the modeling is approved with the aid of some simulation in MATLAB and comparing the results with SimScape. Also in order to show the efficiency of the mentioned improvement on the workspace of the robot, a comparative simulation study is performed between the traditional stationary cable robot and the proposed moving one. It is shown that using the proposed novel parallel robot, it is possible to carry any load between two points within a wide workspace and with high accuracy.






























Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Liu XJ and Wang J (2014) Parallel kinematics. Springer Tracts in Mechanical Engineering
McCloy D (1990) Some comparisons of serial-driven and parallel-driven manipulators. Robotica 8(4):355–362
Gosselin C and Angeles J (1988) The optimum kinematic design of a planar three-degree-of-freedom parallel manipulator
Carretero J, Podhorodeski R, Nahon M, Gosselin CM (2000) Kinematic analysis and optimization of a new three degree-of-freedom spatial parallel manipulator. J Mech Des 122(1):17–24
Khalil W, Guegan S (2004) Inverse and direct dynamic modeling of Gough–Stewart robots. IEEE Trans Rob 20(4):754–761
Nan R (2006) Five hundred meter aperture spherical radio telescope (FAST). Sci China Series G 49(2):129–148
Khosravi MA, Taghirad HD (2011) Dynamic analysis and control of cable driven robots considering elasticity in cables. CCToMM M 3:1–12
Ferravante V, Riva E, Taghavi M, Braghin F, Bock T (2019) Dynamic analysis of high precision construction cable-driven parallel robots. Mech Mach Theory 135:54–64
Pinto AM, Moreira E, Lima J, Sousa JP, Costa P (2017) A cable-driven robot for architectural constructions: a visual-guided approach for motion control and path-planning. Auton Robot 41(7):1487–1499
Tourajizadeh H, Manteghi S (2016) Design and optimal control of dual-stage Stewart platform using feedback-linearized quadratic regulator. Adv Robot 30(20):1305–1321
Boian RF, Bouzit M, Burdea GC, Lewis J, Deutsch JE (2005) Dual Stewart platform mobility simulator. In9th International Conference on Rehabilitation Robotics, 2005. ICORR 2005, IEEE, (pp 550–555)
Stefek A, Van Pham T, Krivanek V, Pham KL (2020) Energy comparison of controllers used for a differential drive wheeled mobile robot. IEEE Access 8:170915–170927
Majd K, Razeghi-Jahromi M, Homaifar A (2019) A stable analytical solution method for car-like robot trajectory tracking and optimization. IEEE/CAA J Automatica Sinica 7(1):39–47
Liao J, Chen Z, Yao B (2018) Model-based coordinated control of four-wheel independently driven skid steer mobile robot with wheel–ground interaction and wheel dynamics. IEEE Trans Industr Inf 15(3):1742–1752
Korayem M, Nazemizadeh M, and Ghaffarpour H (2012) Optimal path planning of nonholonomic mobile robots using optimal control method and verification of the method via experimental tests of the Scout mobile robot.
Korayem M, Yousefzadeh M, Susany S (2017) Dynamic modeling and feedback linearization control of wheeled mobile cable-driven parallel robot considering cable sag. Arab J Sci Eng 42(11):4779–4788
Goodarzi R, Korayem MH, Tourajizadeh H, Nourizadeh M (2022) Nonlinear dynamic modeling of a mobile spatial cable-driven robot with flexible cables. Nonlinear Dyn 108(4):3219–3245
Dahmane S-A, Azzedine A, Megueni A, Slimane A (2019) Quantitative and qualitative study of methods for solving the kinematic problem of a planar parallel manipulator based on precision error optimization. Int J Interact Design Manuf (IJIDeM) 13(2):567–595
Dahmane SA, Megueni A, Azzedine A, Slimane A, Lousdad A (2019) Determination of the optimal path of three axes robot using genetic algorithm. Int J Eng Res Afr 44:135–149
Dahmane S-A et al (2023) Analysis and compensation of positioning errors of robotic systems by an interactive method. J Braz Soc Mech Sci Eng 45(2):119
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Seif, A.H., Korayem, M.H., Tourajizadeh, H. et al. Design and modeling of a novel mobile cable robot with dual-stage end effector. Intel Serv Robotics 17, 1143–1162 (2024). https://doi.org/10.1007/s11370-024-00561-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11370-024-00561-2