
Abstract
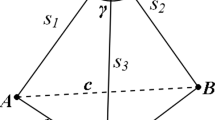
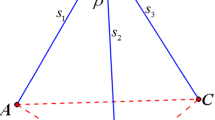
In this paper, it is proved that, given 3 control points A, B and C, if the camera's optical center O lies on one of the three planes perpendicular to the plane ABC and going through one of the three altitudes of the triangle ABC, and additionally its projection on the plane ABC is within the circumscribed circle of the triangle, that is, O is within the so-called “danger cylinder”, then the corresponding P3P problem O, (ABC) must have 4 positive solutions. This result is purely geometrical, and more instructive. It can bring some new insight into a better understanding of multiple-solution problem in the P$n$P problem, and could be used as some theoretical guide to arrange control points in real applications.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Fishler M A, Bolles R C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Comm. ACM, 1981, 24(6): 381–395.
Haralick R M, Lee C, Ottenberg K, Nölle M. Analysis and solutions of the three point perspective pose estimation problem. In Proc. IEEE Conf. Computer Vision and Pattern Recognition, Maui, Hawaii, 1991, pp.592–598.
Horaud R, Conio B, Leboulleux O. An analytic solution for the perspective 4-point problem. In Proc. Conf. Computer Vision, Graphics, Image Processing, 1989, 47: 33–44.
Wolfe W J, Mathis D, Sklair C W, Magee M. The perspective view of three points. IEEE Trans. Pattern Analysis and Machine Intelligence, 1991, 13(1): 66–73.
Su C, Xu Y Q, Li H, Liu S Q. Necessary and sufficient condition of positive root number of perspective-three-point problem. Chinese J. Computers, 1998, 21(12): 1084–1095. (in Chinese)
Quan L, Lan Z D. Linear N-point camera pose determination. IEEE Trans. Pattern Analysis and Machine Intelligence, 1999, 21(8): 774–780.
Dhome M, Richetin M, Lapreste J T, Rives G. Determination of the attitude of 3-D objects from a single perspective view. IEEE Trans. Pattern Analysis and Machine Intelligence, 1989, 11(12): 1265–1278.
Abidi M A, Chandra T. A new efficient and direct solution for pose estimation using quadrangular targets: Algorithm and evaluation. IEEE Trans. Pattern Analysis and Machine Intelligence, 1995, 17(5): 534–538.
Gao X S, Hou X R, Tang J L et al. Complete Solution classification for the perspective-three-point problem. IEEE Trans. Pattern Analysis and Machine Intelligence, 2003, 25(8): 930–943.
Fiore P D. Efficient linear solution of exterior orientation. IEEE Trans. Pattern Analysis and Machine Intelligence, 2001, 23(2): 140–148.
Ansar A, Daniilidis K. Linear pose estimation from points and lines. IEEE Trans. Pattern Analysis and Machine Intelligence, 2003, 25(5): 578–589.
Abdel-Aziz Y I, Karara H M. Direct linear transformation into object space coordinates in close-range photogrammetry. In Proc. Symp. Close-Range Photogrammetry, 1971, pp.1–18.
Thompson E H. Space resection: Failure cases. Photogrammetric Record, X, 1966, 27(X): 201–204.
Hartley R I, Zisserman A. Multiple View Geometry in Computer Vision. Cambridge University Press, 2000.
Author information
Authors and Affiliations
Corresponding author
Additional information
Supported by the National Natural Science Foundation of China under Grant Nos.60375006 and 60475009.
Cai-Xia Zhang received the B.S. and M.S. degrees from Shandong University, China, in 1999 and 2002 respectively. She is currently a Ph.D. candidate of National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Sciences. Her current research interests include computer vision, multiple view geometry, and image processing.
Zhan-Yi Hu received the B.S. degree in automation from the North China University of Technology in 1985, the Ph.D. degree (Docteur d'Etat) in computer science from the University of Liege, Belgium, in 1993. Since 1993, he has been with Institute of Automation, the Chinese Academy of Sciences. From May 1997 to May 1998, he was a visiting scholar to the Chinese University of Hong Kong. Dr. Hu now is a research professor of computer vision, a member of the Executive Expert Committee of the Chinese National High Technology R&D Program. His current research interests are in robot vision, including camera calibration, 3D reconstruction, and vision guided robot navigation. Dr. Hu has published more than 70 peer-reviewed papers on major national and international journals.
Rights and permissions
About this article
Cite this article
Zhang, CX., Hu, ZY. A General Sufficient Condition of Four Positive Solutions of the P3P Problem. J Comput Sci Technol 20, 836–842 (2005). https://doi.org/10.1007/s11390-005-0836-0
Received:
Revised:
Issue Date:
DOI: https://doi.org/10.1007/s11390-005-0836-0