
Abstract
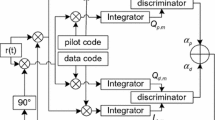
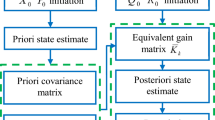
A new adaptive Kalman filtering algorithm for dual-frequency navigation using carrier phase is presented. This algorithm gives consideration to both robustness and sensitivity by combining the two main approaches of adaptive Kalman filtering based on innovation-based adaptive estimation (IAE) and fading filtering. Applicable to the navigation using carrier phase measurements typically, this algorithm can balance the weights of observations and predicted states preferably. Applications to both practical static data and kinetic simulations are presented to demonstrate the validity and efficiency of the algorithm.
Similar content being viewed by others

References
Zhang Z T, Zhang J S. A novel strong tracking finite-difference extended Kalman filter for nonlinear eye tracking. Sci China Ser F-Inf Sci, 2009, 52: 688–694
Yang Y X, Gao W G. Comparison of adaptive factors in Kalman filters on navigation results. J Navigation, 2005, 58: 471–478
Mohamed A H, Schwarz K P. Adaptive Kalman filtering for INS/GPS. J Geodesy, 1999, 73: 193–203
Bian H W, Jin Z H, Wang J P. The innovation-based estimation adaptive Kalman filter algorithm for INS/GPS integrated navigation system. J Shanghai Jiaotong Univ, 2006, 40: 1000–1009
Sinha A, Kirubarajan T, Bar-Shalom Y. Application of the Kalman-Levy filter for tracking maneuvering targets. IEEE Trans Aerospace Electron Syst, 2007, 43: 1099–11077
Han B, Lin X G. Adapt the steady-state Kalman gain using the normalized autocorrelation of innovations. IEEE Signal Proc Let, 2005, 12: 780–783
Sarkka S, Nummenmma A. Recursive noise adaptive Kalman filtering by variational Bayesian approximations. IEEE Trans Automat Contr, 2009, 54: 596–600
Wang J Z, Milstein L B. CDMA overlay situations for microcellular mobile communications. IEEE Trans Commun, 1995, 43: 603–614
Khanafseh S, Pervan B. New approach for calculating position domain integrity risk for cycle resolution in carrier phase navigation systems. IEEE Trans Aerospace Electron Syst, 2010, 46: 296–307
Hao M, Wang Q L, Cui D X. Study on fast convergence method in precise point positioning. J Geodesy and Geodyn, 2009, 29: 88–99
Wu J F, Huang C. GPS precise point positioning models and their utility models. J Geodesy Geodyn, 2008, 28: 96–100
Lu Y. GPS Global Positioning Receiver—Principles and Software Realization. Beijing: Publishing House of Electronics Industry, 2009
John M, Dow J M, Neilan R E, et al. The international GNSS service in a changing landscape of global navigation satellite systems. J Geodesy, 2009, 83: 191–198
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lu, C., Tan, Y., Zhu, B. et al. Improved innovation-based adaptive Kalman filter for dual-frequency navigation using carrier phase. Sci. China Inf. Sci. 53, 2653–2663 (2010). https://doi.org/10.1007/s11432-010-4117-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11432-010-4117-3