
Abstract
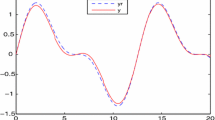
In this paper, a new fuzzy adaptive control approach is developed for a class of SISO uncertain pure-feedback nonlinear systems with immeasurable states. Fuzzy logic systems are utilized to approximate the unknown nonlinear functions; and the filtered signals are introduced to circumvent algebraic loop systems encountered in the implementation of the controller, and a fuzzy state adaptive observer is designed to estimate the immeasurable states. By combining the adaptive backstepping technique, an adaptive fuzzy output feedback control scheme is developed. It is proven that the proposed control approach can guarantee that all the signals of the resulting closed-loop system are semi-globally uniformly ultimately bounded (SGUUB), and the observer and tracking errors converge to a small neighborhood of the origin by appropriate choice of the design parameters. Simulation studies are included to illustrate the effectiveness of the proposed approach.
Similar content being viewed by others

References
Yang Y S, Zhou C J. Adaptive fuzzy H ∞ stabilization for strict-feedback canonical nonlinear systems via backstepping and small-gain approach. IEEE Trans Fuzzy Syst, 2005, 13: 104–114
Zhou S S, Feng G, Feng C B. Robust control for a class of uncertain nonlinear systems: adaptive fuzzy approach based on backstepping. Fuzzy Sets Syst, 2005, 151: 1–20
Zhang Y, Peng P Y, Jiang Z P. Stable neural controller design for unknown nonlinear systems using backstepping. IEEE Trans Neural Netw, 2000, 11: 1347–1360
Chen B, Liu X P, Liu K F, et al. Direct adaptive fuzzy control for nonlinear systems with time-varying delays. Inf Sci, 2010, 180: 776–792
Wang M, Chen B, Liu X P, et al. Adaptive fuzzy tracking control for a class of perturbed strict-feedback nonlinear time-delay systems. Fuzzy Sets Syst, 2008, 159: 949–967
Wang M, Zhang S Y, Chen B, et al. Direct adaptive neural control for stabilization of nonlinear time-delay systems. Sci China Inf Sci, 2010, 53: 800–812
Chen B, Liu X P. Fuzzy approximate disturbance decoupling of MIMO nonlinear systems by backstepping and application to chemical processes. IEEE Trans Fuzzy Syst, 2005, 13: 832–847
Chen B, Liu X P, Liu K F, et al. Novel adaptive neural control design for nonlinear MIMO time-delay systems. Automatica, 2009, 46: 1554–1560
Ge S S, Wang C. Adaptive neural control of uncertain MIMO nonlinear systems. IEEE Trans Neural Netw, 2004, 15: 674–692
Mei R, Wu Q X, Jiang C S. Robust adaptive backstepping control for a class of uncertain nonlinear systems based on disturbance observers. Sci China Inf Sci, 2010, 53: 1201–1215
Hua C C, Wang Q G, Guan X P. Adaptive fuzzy output-feedback controller design for nonlinear time-delay systems with unknown control direction. IEEE Trans Syst Man Cybern Part B-Cybern, 2009, 39: 363–374
Tong S C, He X L, Zhang H G. A combined backstepping and small-gain approach to robust adaptive fuzzy output feedback control. IEEE Trans Fuzzy Syst, 2009, 17: 1059–1069
Tong S C, Li Y M. Robust adaptive fuzzy backstepping output feedback tracking control for nonlinear system with dynamic uncertainties. Sci China Inf Sci, 2010, 53: 307–324
Kristic M, Kanellakopoulos I, Kokotovic P V. Nonlinear and Adaptive Control Design. New York: Wiley, 1995
Wang D, Huang J. Adaptive neural network control of a class of uncertain nonlinear systems in pure-feedback form. Automatica, 2002, 42: 1365–1372
Ge S S, Wang C. Adaptive NN control of uncertain nonlinear pure-feedback systems. Automatica, 2002, 38: 671–684
Wang C, Hill D J, Ge S S, et al. An ISS modular approach for adaptive neural control of pure-feedback systems. Automatica, 2006, 42: 671–684
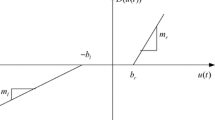
Zhang T P, Ge S S. Adaptive dynamic surface control of nonlinear systems with unknown dead zone in pure feedback form. Automatica, 2008, 44: 1895–1903
Zhang T P, Wen H, Zhu Q. Adaptive fuzzy control of nonlinear systems in pure-feedback form based on input-to state stability. IEEE Trans Fuzzy Syst, 2010, 18: 1–13
Wang M, Ge S S, Hong K S. Approximation-based adaptive tracking control of pure-feedback nonlinear systems with multiple unknown time-delays. IEEE Trans Neural Netw, 2010, 21: 1804–1816
Zou A M, Hou Z G. Adaptive control of a class of nonlinear pure-feedback systems using fuzzy backstepping approach. IEEE Trans Fuzzy Syst, 2008, 16: 886–897
Wang L X. Adaptive Fuzzy Systems and Control. Englewood Cliffs: Prentice Hall, 1994
Kim E, Sungryul L. Output feedback tracking control of MIMO systems using a fuzzy disturbance observer and its applications to the speed control of a PM synchronous motor. IEEE Trans Fuzzy Syst, 2005, 13: 725–741
Ploycarpou M M, Ioannou P A. A robust adaptive nonlinear control design. Automatica, 1996, 32: 423–427
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Tong, S., Li, Y. Observer-based adaptive fuzzy backstepping control of uncertain nonlinear pure-feedback systems. Sci. China Inf. Sci. 57, 1–14 (2014). https://doi.org/10.1007/s11432-013-5043-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11432-013-5043-y