
Abstract
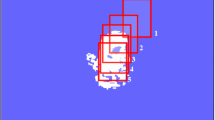
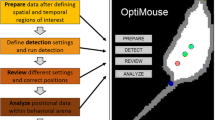
Animal tracking is an important tool for observing behavior, which is useful in various research areas. Animal specimens can be tracked using dynamic models and observation models that require several types of data. Tracking mouse has several barriers due to the physical characteristics of the mouse, their unpredictable movement, and cluttered environments. Therefore, we propose a reliable method that uses a detection stage and a tracking stage to successfully track mouse. The detection stage detects the surface area of the mouse skin, and the tracking stage implements an extended Kalman filter to estimate the state variables of a nonlinear model. The changes in the overall shape of the mouse are tracked using an oval-shaped tracking model to estimate the parameters for the ellipse. An experiment is conducted to demonstrate the performance of the proposed tracking algorithm using six video images showing various types of movement, and the ground truth values for synthetic images are compared to the values generated by the tracking algorithm. A conventional manual tracking method is also applied to compare across eight experimenters. Furthermore, the effectiveness of the proposed tracking method is also demonstrated by applying the tracking algorithm with actual images of mouse.

Graphical abstract










Similar content being viewed by others
References
Cohen A, Denenberg VH (1973) A small-animal activity-analysing system for behavioural studies. Med Biol Eng 11(4):490–499
Burghardt T and Campbell N. Individual animal identification using visual biometrics on deformable coat patterns. In Proceedings of the 5th International Conference on Computer Vision Systems, Berlin, Germany. Accessed. 2007
Gonçalves WN et al. (2007) Hidden markov models applied to snakes behavior identification. In Pacific-Rim Symposium on Image and Video Technology. Springer
Burghardt, T. and J. Calic (2006) Real-time face detection and tracking of animals. In 2006 8th Seminar on Neural Network Applications in Electrical Engineering. IEEE
Zhou J and Clark CM(2006) Autonomous fish tracking by rov using monocular camera. In The 3rd Canadian Conference on Computer and Robot Vision (CRV'06). IEEE
Wawerla J, Marshall S, Mori G, Rothley K, Sabzmeydani P (2009) Bearcam: automated wildlife monitoring at the arctic circle. Mach Vis Appl 20(5):303–317
Tweed D and Calway A(2002) Tracking many objects using subordinated condensation. in BMVC
Spink A et al (2001) The EthoVision video tracking system—a tool for behavioral phenotyping of transgenic mice. Physiol Behav 73(5):731–744
Noldus LP (1991) The observer: a software system for collection and analysis of observational data. Behav Res Methods 23(3):415–429
Noldus LP et al (2000) The Observer Video-Pro: new software for the collection, management, and presentation of time-structured data from videotapes and digital media files. Behav Res Methods 32(1):197–206
Boon C (1981) The effect of departures from lower critical temperature on the group postural behaviour of pigs. Anim Prod 33(01):71–79
Goddard, J., et al. (2002) Real-time landmark-based unrestrained animal tracking system for motion-corrected PET/SPECT imaging. In Nuclear Science Symposium Conference Record, 2002 IEEE
Wikelski M, Kays RW, Kasdin NJ, Thorup K, Smith JA, Swenson GW (2007) Going wild: what a global small-animal tracking system could do for experimental biologists. J Exp Biol 210(2):181–186
Klapdor K, Dulfer B, and van der Staay F. A computer-aided method to analyse foot print patterns of rats, mice and humans. In Proceedings of Measuring Behavior ‘96, International Workshop on Methods and Techniques in Behavioral Research (Utrecht, 16–18 October 1996). 1996
Mason S, Fyfe I (1981) Assessment of single-limb activity in small rodents. Med Biol Eng Comput 19(4):486–490
Vorhees CV, Acuff-Smith KD, Minck DR, Butcher RE (1992) A method for measuring locomotor behavior in rodents: contrast-sensitive computer-controlled video tracking activity assessment in rats. Neurotoxicol Teratol 14(1):43–49
Kropveld D, Chamuleau R (1993) Doppler radar device as a useful tool to quantify the liveliness of the experimental animal. Med Biol Eng Comput 31(4):340–342
Crabbe JC, Wahlsten D, Dudek BC (1999) Genetics of mouse behavior: interactions with laboratory environment. Science 284(5420):1670–1672
Cui J, Acton ST, Lin Z (2006) A Monte Carlo approach to rolling leukocyte tracking in vivo. Med Image Anal 10(4):598–610
Lee H-Y, Hsieh TH, Liang JI, Yeh ML, Chen JJJ (2012) Quantitative video-based gait pattern analysis for hemiparkinsonian rats. Med Biol Eng Comput 50(9):937–946
Sen R, Wu M, Branson K, Robie A, Rubin GM, Dickson BJ (2017) Moonwalker descending neurons mediate visually evoked retreat in drosophila. Curr Biol 27(5):766–771
Doucet A, De Freitas N, and Gordon N, An introduction to sequential Monte Carlo methods, in Sequential Monte Carlo methods in practice. 2001, Springer. p. 3–14
Doucet A, On sequential simulation-based methods for Bayesian filtering. 1998
Kay SM. Fundamentals of statistical signal processing: practical algorithm development. Vol. 3. 2013: Pearson Education
Kristiansen NK, Sjöström S-O, Nygaard H (2005) Urinary bladder volume tracking using a Kalman filter. Med Biol Eng Comput 43(3):331–334
Gonzalez, R. and P. Wintz, Digital image processing. 1977
Jaward M, et al. Multiple object tracking using particle filters. In 2006 I.E. Aerospace Conference. 2006. IEEE
Funding
This study was supported by Soonchunhyang University Research Fund and a grant (NRF-2015R1D1A3A01020539) of the Basic Science Research Program through National Research Foundation of Korea (NRF), funded by the Ministry of Education, Republic of Korea.
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest.
Rights and permissions
About this article

Cite this article
Choi, H., Kim, M. & Lee, O. An extended Kalman filter for mouse tracking. Med Biol Eng Comput 56, 2109–2123 (2018). https://doi.org/10.1007/s11517-018-1805-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11517-018-1805-4