
Abstract
Objective
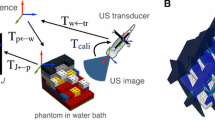
By adding a tracking sensor to a 3D ultrasound (US) probe and thus locating the probe in space, new applications within the fields of image guided surgery and radiation therapy are possible. To locate the US volume in space, a calibration is necessary to determine the mathematical transformation for mapping points from the tracking coordinate system to the US image coordinate system. We present a comprehensive comparison of two different approaches to perform this calibration for 3D US.
Methods
For both approaches a phantom is scanned and located in the images by means of segmentation and registration techniques. Calibration is then performed by either relating the tracked phantom’s (TP) spatial location to the calibration scans, or by solely correlating scans taken from multiple perspectives when using hand–eye calibration methods (HE). Depending on which approach is utilized, a minimum of one or three images, respectively, need to be acquired for the calibration process.
Results
We evaluated both approaches for calibration and reconstruction precision. Regarding the latter, the performed tests led to mean target localization errors of 3.5 mm (HE) and 3.3 mm (TP) for real data, and of 1.4 mm (HE) and 0.9 mm (TP) for simulated data.
Conclusion
Our results indicate that taking additional scans leads to a significant improvement in the calibration. Furthermore, the obtained calibration and reconstruction precisions suggest the use of a TP.
Similar content being viewed by others


References
Adams R, Bischof L (1994) Seeded region growing. IEEE Trans Pattern Anal Mach Intell 16(6): 641–647
Andreff N, Horaud RP, Espiau B (2001) Robot hand–eye calibration using structure from motion. Int J Rob Res 20(3): 228–248
Besl PJ, McKay HD (1992) A method for registration of 3-d shapes. IEEE Trans Pattern Anal Mach Intell 14(2): 239–256
Boctor EM, Iordachita I, Fichtinger G, Hager GD (2006) Ultrasound self-calibration. Proc SPIE 6141: 784–795
Bouchet LG, Meeks SL, Goodchild G, Bova FJ, Buatti JM, Friedman WA (2001) Calibration of three-dimensional ultrasound images for image-guided radiation therapy. Phys Med Biol 46: 559–577
Carr J (1996) Surface reconstruction in 3D medical imaging. Ph.D. thesis, University of Canterbury, Christchurch, New Zealand
Chen HH (1991) A screw motion approach to uniqueness analysis of head-eye geometry. In: Proceedings CVPR, IEEE Computer Society Conference, pp 145–151
Chou JCK, Kamel M (1991) Finding the position and orientation of a sensor on a robot manipulator using quaternions. Int J Rob Res 10(3): 240–254
Daniilidis K (1999) Hand–eye calibration using dual quaternions. Int J Rob Res 18: 286–298
Hassenpflug P, Vetter M, Wolf I, Thorn M, Grenacher L, Richter GM, Lamade W, Uhl W, Buechler MW, Meinzer H-P (2003) Generation of attributed relational vessel-graphs from three-dimensional freehand ultrasound for intraoperative registration in image-guided liver surgery. Proc SPIE 5029: 222–230
Hastenteufel M, Mottl-Link S, Wolf I, de Simone R, Meinzer H-P (2003) A method for the calibration of 3D ultrasound transducers. Proc SPIE 5029: 231–238
Horaud R, Dornaika F (1995) Hand–eye calibration. Int J Rob Res 14: 195–210
Kavan L, Collins S, O’Sullivan C, Zara J (2006) Dual Quaternions for Rigid Transformation Blending. Technical Report TCD-CS-2006-46, Trinity College, Dublin
Khadem R, Yeh CC, Sadeghi-Tehrani M, Bax MR, Johnson JA, Welch JN, Wilkinson EP, Shahidi R (2000) Comparative tracking error analysis of five different optical tracking systems. Comput Aided Surg 5(2): 98–107
Lange T, Eulenstein S (2002) Calibration of swept-volume 3D ultrasound. In: Proceedings of Medical Image Understanding and Analysis 2002, The University of Portsmouth
Lindseth F, Tangen GA, Lango T, Bang J (2003) Probe calibration for freehand 3-d ultrasound. Ultrasound Med Biol 29(11): 1607–1623
Ma B, Moghari MH, Ellis RE, Abolmaesumi P (2007) On fiducial target registration error in the presence of anisotropic noise. In: Proc MICCAI, vol 4792. Springer, Berlin, pp 628–635
Mercier L, Lango T, Lindseth F, Collins DL (2005) A review of calibration techniques for freehand 3D ultrasound systems. Ultrasound Med Biol 31(4): 449–471
Moré JJ (1978) The Levenberg-Marquardt algorithm: implementation and theory. In: Watson GA (ed) Numerical analysis: proceedings of the Biennial Conference held at Dundee, June 28–July 1, 1977. Lecture Notes in Mathematics, vol 630. Springer, Berlin, pp 104–116 (of xii + 199)
Poon TC, Rohling RN (2005) Comparison of calibration methods for spatial tracking of a 3D ultrasound probe. Ultrasound Med Biol 31(8): 1095–1108
Prager RW, Rohling RN, Gee AH, Berman L (1998) Rapid calibration for 3-d freehand ultrasound. Ultrasound Med Biol 24(6): 855–869
Schmidt J, Vogt F, Niemann H (2005) Robust hand–eye calibration of an endoscopic surgery robot using dual quaternions. In: Pattern Recognition, 27th DAGM Symposium, vol 3663. Springer, Berlin, pp 548–556
Strobl KH, Hirzinger (2006) Optimal hand–eye calibration. In: Proc IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2006), Beijing, China, pp 4647–4653
Treece GM, Gee AH, Prager RW, Cash CJC, Berman LH (2003) High-definition freehand 3-d ultrasound. Ultrasound Med Biol 29(4): 529–546
Tsai RY, Lenz RK (1989) A new technique for fully autonomous and efficient 3D robotics hand/eye calibration. IEEE Trans Rob Autom 5: 345–358
Author information
Authors and Affiliations
Corresponding authors
Rights and permissions
About this article
Cite this article
Bergmeir, C., Seitel, M., Frank, C. et al. Comparing calibration approaches for 3D ultrasound probes. Int J CARS 4, 203–213 (2009). https://doi.org/10.1007/s11548-008-0258-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-008-0258-x