
Abstract
Purpose
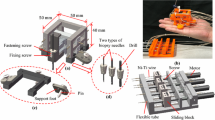
Precision skull surgery requires specialized instrumentation to satisfy demanding requirements in cochlear array implantation, deep brain stimulation electrode placement, and related applications. A miniaturized reconfigurable parallel kinematic mechanism which can be directly mounted on a patient’s skull was designed, built, and tested for precision skull surgery.
Methods
A Stewart–Gough platform is attached to a patient’s skull so no optical tracking affecting the overall accuracy in keyhole surgery is required. Six bone anchors comprising the mechanism base joints are implanted at positions with sufficient skull thickness. Since no fixation frame is required, intervention planning flexibility is increased. The centers of the spherical shaped bone anchors can be localized accurately in the image space. An implicit registration to the physical space is performed by assembling the kinematics. Registration error is minimized compared to common optical tracker-based approaches. Due to the reconfigurable mechanism, an optimization of the hexapod’s configuration is needed to maximize accuracy and mechanical stability during the incision. Mathematical simulation was conducted to estimate system performance.
Results
Simulation results revealed significant improvement in accuracy and stability when exploiting the redundant degrees of freedom and the implemented reconfigurability. Inaccurate localization of base points in the image data set was identified as the main source of error. A first prototype with passive prismatic actuators, i.e. micrometer calipers, was successfully built.
Conclusions
A head-mounted parallel kinematic device for high precision skull surgery was developed that provides submillimetric accuracy in straight-line incisions. The system offers enhanced flexibility due to the absence of a rigid fixation frame.
Similar content being viewed by others


References
Balachandran R, Mitchell JE, Blachon G, Noble JH, Dawant BM, Fitzpatrick JM, Labadie RF (2010) Percutaneous cochlear implant drilling via customized frames: an in vitro study. Otolaryngol Head Neck Surg 142(3): 421–426
Baron S, Eilers H, Hornung O, Heimann B, Leinung M, Bartling S, Lenarz T, Majdani O (2006) Conception of a robot assisted cochleostomy: first experimental results. In: Proceedings of the 7th international workshop on research and education in mechatronics
Bast P, Popovic A, Wu T, Heger S, Engelhardt M, Lauer W, Radermacher K, Schmieder K (2006) Robot- and computer-assisted craniotomy: resection planning, implant modelling and robot safety. Int J Med Robotics Comput Assist Surg 2(2): 168–178
Chauhan S, Tan MT, Seet G, Ng I (2009) Minimally invasive robotic HIFU neurosurgical applications. In: 38th annual symposium of the ultrasonic industry association (UIA), 1–5. doi:10.1109/UIA.2009.5404033
Deacon G, Harwood A, Holdback J, Maiwand D, Pearce M, Reid I, Street M, Taylor J (2010) The Pathfinder image-guided surgical robot. Proc IME H J Eng Med 224(5): 691–713. doi:10.1243/09544119JEIM617
Eilers H, Baron S, Ortmaier T, Heimann B, Baier C, Rau TS, Leinung M, Majdani O (2009) Navigated, robot assisted drilling of a minimally invasive cochlear access. In: Proceedings of the 2009 IEEE international conference on mechatronics. IEEE, Málaga, Spain doi:10.1109/ICMECH.2009.4957213
Eilers H, Hussong A, Baron S, Heimann B, Rau T, Leinung M, Lenarz T, Majdani O (2007) Optimierung der Trajektorienplanung für eine minimalinvasive Cochleostomie. In: Tagungsband der 6. Jahrestagung der Gesellschaft für Computer- und Roboterassistierte Chirurgie e.V., CURAC, Karlsruhe, pp 219–222
Gosselin CM, Angeles J (1990) Singularity analysis of closed-loop kinematic chains. IEEE Trans on Robotics and Autom 6(3): 281–290
Gough VE, Whitehall SG (1962) Universal tyre test machine. In: Proceedings of the 9th FISITA—international automobile technical congress, pp 117–137
Haidegger T, Xia T, Kazanzides P (2008) Accuracy improvement of a neurosurgical robot system. In: 2nd IEEE RAS EMBS international conference on biomedical robotics and biomechatronics, BioRob 2008, 836–841 doi:10.1109/BIOROB.2008.4762912
Handini D, Yeong TM, Hong LV (2004) System integration of neurobot: a skull-base surgical robotic system. In: 2004 IEEE conference on robotics, automation and mechatronics, vol 1, pp 43–48. doi:10.1109/RAMECH.2004.1438889
Hansen ER, Walster GW (2004) Global optimization using interval analysis. Marcel Dekker and Sun Microsystems, New York
Hogetex: Hogetex—corporate homepage (2009). http://www.hogetex.com/speerschroefmaat-50-75mm.html
Hussong A, Rau T, Ortmaier T, Heimann B, Lenarz T, Majdani O (2010) An automated insertion tool for cochlear implants: another step towards atraumatic cochlear implant surgery. Int J CARS 5: 163–171. doi:10.1007/s11548-009-0368-0
Jaulin L, Kieffer M, Didrit O, Walter E (2001) Applied interval analysis. Springer, Berlin
Joskowicz L, Shamir R, Freiman M, Shoham M, Zehavi E, Umansky F, Shoshan Y (2006) Image-guided system with miniature robot for precise positioning and targeting in keyhole neurosurgery. Comp Aid Surg 11(4): 181–193. doi:10.3109/10929080600909351
Klenzner T, Ngan CC, Knapp FB, Knoop H, Kromeier J, Aschendorff A, Papastathopoulos E, Raczkowsky J, Wörn H, Schipper J (2009) New strategies for high precision surgery of the temporal bone using a robotic approach for cochlear implantation. Eur Arch Otorhinolaryngol 266(7): 955–960. doi:10.1007/s00405-008-0825-3
Knappe P, Gross I, Pieck S, Wahrburg J, Kuenzler S, Kerschbaumer F (2003) Position control of a surgical robot by a navigation system. In: Proceedings of the IEEE/RSJ international conference on intelligent robots and systems (IROS 2003) 4:3350–3354
Kotlarski J, Abdellatif H, Heimann B (2008) Improving the pose accuracy of a planar \({3\underline{{\rm R}}{\rm RR}}\) parallel manipulator using kinematic redundancy and optimized switching patterns. In: Proceedings of the 2008 international conference on robotics and automation, Pasadena, USA pp 3863–3868
Kotlarski J, de Nijs R, Abdellatif H, Heimann B (2009) New interval-based approach to determine the guaranteed singularity-free workspace of parallel robots. In: Proceedings of the 2009 international conference on robotics and automation, Kobe, Japan, pp 1256–1261
Labadie R, Mitchell J, Balachandran R, Fitzpatrick JM (2009) Customized, rapid-production microstereotactic table for surgical targeting: description of concept and in vitro validation. Int J CARS 4(3): 273–280. doi:10.1007/s11548-009-0292-3
Labadie R, Noble JH, Dawant BM, Balachandran R, Majdani O, Fitzpatrick JM (2008) Clinical validation of percutaneous cochlear implant surgery: initial report. Laryngoscope 118(6): 1031–1039. doi:10.1097/MLG.0b013e31816b309e
Labadie RF, Balachandran R, Fitzpatrick JM (2008) Accuracy of image-guided surgical systems at the lateral skull base as clinically assessed using bone-anchored hearing aid posts as surgical targets. Meeting of the American Neurotology Society, Orlando
Majdani O, Bartling S, Leinung M, Stöver T, Lenarz M, Dullin C, Lenarz T (2008) A true minimally invasive approach for cochlear implantation: high accuracy in cranial base navigation through flat-panel-based volume computed tomography. Otol Neurotol 29(2): 120–123. doi:10.1097/mao.0b013e318157f7d8
Majdani O, Bartling S, Rodt T, Eilers H, Dulling C, Issa G, Rau T, Lenarz M, Lenarz T, Leinung M (2007) Volume computed tomography for navigated procedures at the lateral skull base—proof of feasibility on phantom and human temporal bone specimens. GMS Current Topics in Computer- and Robot-Assisted Surgery (GMS CURAC) 2(1)
Majdani O, Rau T, Baron S, Eilers H, Baier C, Heimann B, Ortmaier T, Bartling S, Lenarz T, Leinung M (2009) A robot-guided minimally invasive approach for cochlear implant surgery: preliminary results of a temporal bone study. Int J CARS 4: 475–486. doi:10.1007/s11548-009-0360-8
Manzey D, Strauss G, Trantakis C, Lueth T, Röttger S, Bahner-Heyne J, Dietz A, Meixensberger J (2009) Automation in surgery: a systematic approach. Surg Technol Int 18: 37–45
Merlet JP (2006) Computing the worst case accuracy of a PKM over a workspace or a trajectory. In: Proceedings of the 5th Chemnitz parallel kinematics seminar, pp 83–96
Merlet JP (2006) Jacobian, manipulability, condition number, and accuracy of parallel robots. J Mech Des 128(1): 199–206
Merlet JP (2006) Parallel robots, 2nd edn. Springer, Dordrecht
Merlet JP, Daney D (2005) Dimensional synthesis of parallel robots with a guaranteed given accuracy over a specific workspace. In: Proceedings of the 2005 IEEE international conference on robotics and automation, pp 942–947
Moll FH, Rosa DJ, Ramans AD, Blumenkranz SJ, Guthart GS, Niemeyer GD, Nowlin WC, Salisbury JK, Tierney M (2009) Cooperative minimally invasive telesurgical system, Patent EP1131004
Moore RE (1966) Interval Analysis. Elsevier, Amsterdam
Neumaier A (1990) Interval methods for systems of equations. Cambridge University Press, Cambridge
Pechlivanis I, Kiriyanthan G, Engelhardt M, Scholz M, Lücke S, Harders A, Schmieder K (2009) Percutaneous placement of pedicle screws in the lumbar spine using a bone mounted miniature robotic system: first experiences and accuracy of screw placement. Spine 34(4): 392–398
Schipper J, Aschendorff A, Arapakis I, Klenzner T, Teszler CB, Ridder GJ, Laszig R (2004) Navigation as a quality management tool in cochlear implant surgery. J Laryngol Otol 118(10): 764–770. doi:10.1258/0022215042450643
Schipper J, Klenzner T (2007) Atraumatische funktionserhaltende Hochpräzisionschirurgie des humanen Felsenbeins. Gemeinsamer Schlussbericht aller Projektpartner zum BMBF-Projekt 01EZ0405
Stewart D (1966) A platform with six degrees of freedom. Aircr Eng Aerosp Technol 38(4): 30–35
Warren FM, Balachandran R, Fitzpatrick JM, Labadie RF (2007) Percutaneous cochlear access using bone-mounted, customized drill guides: demonstration of concept in vitro. Otol Neurotol 28(3): 325–329
Wolf A, Jaramaz B, Lisien B, DiGioia AM (2005) MBARS: mini bone-attached robotic system for joint arthroplasty. The Int J Med Robotics and Comput Assist Surg 1(2): 101–121. doi:10.1002/rcs.20
Wolf A, Shoham M (2005) Screw theory tools for the synthesis of the geometry of a parallel robot for a given instantaneous task. Mech Mach Theor 41: 656–670
Wolf A, Shoham M, Michael S, Moshe R (2004) Feasibility study of a mini, bone-attached, robotic system for spinal operations: analysis and experiments. Spine 29(2): 220–228
Wörz S, Rohr K (2006) Localization of anatomical point landmarks in 3d medical images by fitting 3d parametric intensity models. Med Image Anal 10(1): 41–58. doi:10.1016/j.media.2005.02.003
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kobler, JP., Kotlarski, J., Öltjen, J. et al. Design and analysis of a head-mounted parallel kinematic device for skull surgery. Int J CARS 7, 137–149 (2012). https://doi.org/10.1007/s11548-011-0619-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-011-0619-8