
Abstract
Purpose
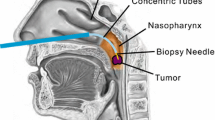
Suspension laryngoscopy has been employed for laryngeal diseases such as treatment for a polyp, cystoma, or granuloma. After securing a straight path with a laryngoscope, the surgeon inserts rigid instruments and examines the target lesion by using a microscope. However, many patients suffer from secondary complications due to the use of a rigid laryngoscope. In addition, about 11–12 % of patients cannot be operated on using laryngoscope because of anatomical restrictions. A surgical method to treat patients using a curved-frame trans-oral robotics system was developed.
Methods
A new surgical procedure is investigated using a new surgical robot system that employs a curved frame as a guide to insert flexible instruments into the target lesion. For this, a master–slave robotic system was developed, and the performance of the proposed procedure was tested by using a phantom laryngeal model.
Results
A routine laryngeal polypectomy procedure was simulated and performed using flexible instruments guided by a master–slave surgical robot in suspension laryngoscopy.
Conclusion
A surgical robotic system was able to perform routine procedures to remove a polyp in the vocal cord under clinically realistic conditions on an adult phantom.









Similar content being viewed by others


References
Xidong C, Xia Z, Chenjie X, Wenhong Y, Huichang Y, Jiaqi J (2012) Management of difficult suspension laryngoscopy using a GlideScope\(\textregistered \) Video Laryngoscope. Arch Otolaryngol 132:1318–1323
Mc Leod IK, Mair EA, Melder PC (2005) Potential applications of the Da Vinci minimally invasive surgical robotic system in otolaryngology. Ear Nose Throat J 84:483–487
Hockstein et al (2005) Robot-assisted pharyngeal and laryngeal microsurgery: results of robotic cadaver dissections. Laryngoscope J 115:1003–1008
Weinstein GS, O’Malley BW Jr, Hockstein NG (2005) Transoral robotic surgery: supraglottic laryngectomy in a canine model. Laryngoscope J 115:1315–1319
O’Malley BW Jr, Weinstein GS, Hockstein NG (2006) Transoral robotic surgery (TORS): glottic microsurgery in a canine model. J Voice 20:263–268
Weinstein et al (2007) Transoral robotic surgery: radical tonsillectomy. Arch Otolaryngol Head Neck Surg 113:1220–1226
O’Malley BW Jr, Weinstein GS, Snyder W, Hockstein NG (2006) Transoral robotic surgery (TORS) for base of tongue neoplasms. Laryngoscope J 116:1465–1472
Weinstein GS et al (2007) Transoral robotic surgery: supraglottic partial laryngectomy. Ann Otol Rhinol Laryngol J 116:19–23
Park YM, Kim WS, Byeon HK, De Virgilio A, Jung JS, Kim SH (2010) Feasibility of transoral robotic hypopharyngectomy for early-stage hypopharyngeal carcinoma. Oral Oncol J 46:597–602
Park YM, Lee WJ, Lee JG, Lee WS, Choi EC, Chung SM, Kim SH (2009) Transoral robotic surgery (TORS) in laryngeal and hypopharyngeal cancer. J Laparoendosc Adv Surg Tech A 19:361–368
Park YM, Kim WS, De Virgilio A, Lee SY, Seol JH, Kim SH (2012) Transoral robotic surgery for hypopharyngeal squamous cell carcinoma: 3-year oncologic and functional analysis. Oral Oncol J 48:560–566
Ikuta K, Hasegawa T, Daifu S (2003) Hyper redundant miniature manipulator Hyper Finger for remote minimally invasive surgery in deep area. In: Proc IEEE Int Conf Robot Autom, pp 1098–1102
Simaan N, Xu K, Wei W, Kapoor A, Taylor R, Flint P (2009) Design and integration of a telerobotic system for minimally invasive surgery of the throat. Int J Robotics Res 28(9):1134–1153
Camarillo DB, Milne CF, Carlson CR, Zinn MR, Salisbury JK (2008) Mechanics modeling of tendon-driven continuum manipulators. IEEE Trans Robot 24(6):1262–1273
Yoon H-S, Choi Y, Yi B-J (2010) A 4 DOF bendable endoscope mechanism for single port access surgery, Workshop on Snakes, Worms and Catheters: Continuum and Serpentine Robots for Minimally Invasive Surgery. IEEE Int Conf Robot Autom, pp 54–56
Acknowledgments
This work is supported by the Technology Innovation Program (10040097) funded by the Ministry of Trade, Industry and Energy Republic of Korea (MOTIE, Korea), supported by GRRC program of Gyeonggi Province (GRRC HANYANG 2013-A02), and financially supported by the Ministry of Trade, Industry and Energy (MOTIE) and Korea Institute for Advancement in Technology (KIAT) through the Workforce Development Program in Strategic Technology, supported by the MOTIE (The Ministry of Trade, Industry and Energy), Korea, under the Robotics-Specialized Education Consortium for Graduates support program supervised by the NIPA (National IT Industry Promotion Agency) (H1502-13- 1001).
Conflict of interest
None.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kwon, YS., Tae, K. & Yi, BJ. Suspension laryngoscopy using a curved-frame trans-oral robotic system. Int J CARS 9, 535–540 (2014). https://doi.org/10.1007/s11548-013-0944-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-013-0944-1