
Abstract
Purpose
Electromagnetic (EM) tracking of instruments within a clinical setting is notorious for fluctuating measurement performance. Position location measurement uncertainty of an EM system was characterized in various environments, including control, clinical, cone beam computed tomography (CBCT), and CT scanner environments. Static and dynamic effects of CBCT and CT scanning on EM tracking were evaluated.
Methods
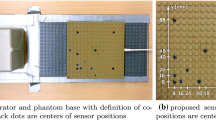
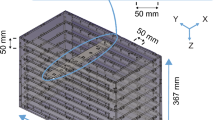
Two guidance devices were designed to solely translate or rotate the sensor in a non-interfering fit to decouple pose-dependent tracking uncertainties. These devices were mounted on a base to allow consistent and repeatable tests when changing environments. Using this method, position and orientation measurement accuracies, precision, and 95 % confidence intervals were assessed.
Results
The tracking performance varied significantly as a function of the environment—especially within the CBCT and CT scanners—and sensor pose. In fact, at a fixed sensor position in the clinical environment, the measurement error varied from 0.2 to 2.2 mm depending on sensor orientations. Improved accuracies were observed along the vertical axis of the field generator. Calibration of the measurements improved tracking performance in the CT environment by 50–85 %.
Conclusion
EM tracking can provide effective assistance to surgeons or interventional radiologists during procedures performed in a clinical or CBCT environment. Applications in the CT scanner demand precalibration to provide acceptable performance.







Similar content being viewed by others

Explore related subjects
Discover the latest articles and news from researchers in related subjects, suggested using machine learning.Notes
The scaffolds’ STL files will be provided upon request to the corresponding author so that the experiments can be repeated by other groups.
References
Thompson S, Penney G, Dasguta P, Hawkes D (2013) Improved modelling of tool tracking errors by modelling dependent marker errors. IEEE Trans Med Imaging 32:165
Kwartowitz DM, Rettmann ME, Holmes III DR, and Robb RA (2010) A novel technique for analysis of accuracy of magnetic tracking systems used in image guided surgery. In: Proc SPIE, pp 76251L–76251L. International Society for Optics and Photonics
Yaniv Z, Wilson E, Lindisch D, Cleary K (2009) Electromagnetic tracking in the clinical environment. Med Phys 36:876
Birkfellner W, Watzinger F, Wanschitz F, Enislidis G, Kollmann C, Rafolt D, Nowotny R, Ewers R, Bergmann H (1998) Systematic distortions in magnetic position digitizers. Med Phys 25:2242
Maier-Hein L, Franz AM, Birkfellner W, Hummel J, Gergel I, Wegner I, Meinzer H-P (2012) Standardized assessment of new electromagnetic field generators in an interventional radiology setting. Med Phys 39:3424
Wilson E, Yaniv Z, Zhang H, Nafis C, Shen E, Shechter G, Wiles AD, Peters T, Lindisch D and Cleary K(2007) A hardware and software protocol for the evaluation of electromagnetic tracker accuracy in the clinical environment: a multi-center study. In: Proc SPIE, pp 65092T–65092T. International Society for Optics and Photonics
Sadjadi H, Hashtrudi-Zaad K and Fichtinger G (2014) Needle deflection estimation: prostate brachytherapy phantom experiments. Int J CARS. doi:10.1007/s11548-014-0985-0
Sadjadi H, Hashtrudi-Zaad K, Fichtinger G (2013) Fusion of electromagnetic trackers to improve needle deflection estimation: simulation study. IEEE Trans Biomed Eng 60:2706–2715
Sadjadi H, Hashtrudi-Zaad K and Fichtinger G (2012) Needle deflection estimation using fusion of electromagnetic trackers. In: 2012 annual international conference of the IEEE engineering in medicine and biology society (EMBC). IEEE, pp 952–955
Shen E, Shechter G, Kruecker J, Stanton D (2007) Quantification of ac electromagnetic tracking system accuracy in a ct scanner environment. In: Proc SPIE. International Society for Optics and Photonics, pp 65090L–65090L
Cleary K, Zhang H, Glossop N, Levy E, Wood B and Banovac F (2005) Electromagnetic tracking for image-guided abdominal procedures: Overall system and technical issues. In: 27th Annual international conference of the engineering in medicine and biology society, 2005. IEEE-EMBS 2005. IEEE, pp 6748–6753
Bo LE, Leira HO, Tangen GA, Hofstad EF, Amundsen T, Lango T (2012) Accuracy of electromagnetic tracking with a prototype field generator in an interventional or setting. Med Phys 39(1):399
Schicho K, Figl M, Donat M, Birkfellner W, Seemann R, Wagner A, Bergmann H, Ewers R (2005) Stability of miniature electromagnetic tracking systems. Phys Med Biol 50(9):2089
Feuerstein M, Reichl T, Vogel J, Traub J, Navab N (2009) Magneto-optical tracking of flexible laparoscopic ultrasound: Model-based online detection and correction of magnetic tracking errors. IEEE Trans Med Imaging 28(6):951–967
Hummel J, Figl M, Kollmann C, Bergmann H, Birkfellner W (2002) Evaluation of a miniature electromagnetic position tracker. Med Phys 29:2205
Lugez E, Pichora D, Akl S, Ellis R (2014) Intraoperative ct scanning impact on electromagnetic tracking performance. Int J CARS 9(Suppl 1):S107–S108
Krücker J, Xu S, Glossop N, Viswanathan A, Borgert J, Schulz H, Wood BJ (2007) Electromagnetic tracking for thermal ablation and biopsy guidance: clinical evaluation of spatial accuracy. J Vasc Interv Radiol 18(9):1141–1150
Shen E, Shechter G, Kruecker J and Stanton D (2008) Effects of sensor orientation on ac electromagnetic tracking system accuracy in a ct scanner environment. In: Proceedings of SPIE, vol 6918, pp 691823
Lugez E, Pichora D, Akl S, Ellis R (2013) Accuracy of electromagnetic tracking in an operating-room setting. Int J CARS 8(Suppl 1):S147–S148
Lugez E, Pichora DR, Akl SG, and Ellis RE (2013) Accuracy of electromagnetic tracking in an image-guided surgery suite. Int Bone Joint J, 95-B(Supp 28):25–25
Seeberger R, Kane G, Hoffmann J, Eggers G (2012) Accuracy assessment for navigated maxillo-facial surgery using an electromagnetic tracking device. J Cranio Maxill Surg 40(2):156–161
Kral F, Puschban EJ, Riechelmann H, Freysinger W (2013) Comparison of optical and electromagnetic tracking for navigated lateral skull base surgery. Int J Med Robot Comp 9:247–252
Atuegwu NC, Galloway RL (2008) Volumetric characterization of the aurora magnetic tracker system for image-guided transorbital endoscopic procedures. Phys Med Biol 53(16):4355
Day JS, Murdoch DJ, Dumas GA (2000) Calibration of position and angular data from a magnetic tracking device. J Biomech 33(8):1039–1045
Frantz DD, Wiles AD, Leis SE, Kirsch SR (2003) Accuracy assessment protocols for electromagnetic tracking systems. Phys Med Biol 48(14):2241
Franz AM, März J, Hummel J, Birkfellner W, Bendl R, Delorme S, Schlemmer H-P, Meinzer H-P, Maier-Hein L (2012) Electromagnetic tracking for us-guided interventions: standardized assessment of a new compact field generator. Int J Comput Assist Radiol. Surg 7(6):813–818
Hummel JB, Bax MR, Figl ML, Kang Y, Maurer C, Birkfellner WW, Bergmann H, Shahidi R (2005) Design and application of an assessment protocol for electromagnetic tracking systems. Med Phys 32:2371–2379
LaScalza S, Arico J, Hughes R (2003) Effect of metal and sampling rate on accuracy of flock of birds electromagnetic tracking system. J Biomech 36:141–144
Milne AD, Chess DG, Johnson JA, King GJW (1996) Accuracy of an electromagnetic tracking device: a study of the optimal operating range and metal interference. J Biomech 29(6):791–793
Poulin F, Amiot L-P (2002) Interference during the use of an electromagnetic tracking system under or conditions. J Biomech 35(6):733–737
Stevens F, Kulkarni N, Ismaily SK, Lionberger DR (2010) Minimizing electromagnetic interference from surgical instruments on electromagnetic surgical navigation. Clin Orthop Relat Res 468(8):2244–2250
Wagner A, Schicho K, Birkfellner W, Figl M, Seemann R, König F, Kainberger F, Ewers R (2002) Quantitative analysis of factors affecting intraoperative precision and stability of optoelectronic and electromagnetic tracking systems. Med Phys 29:905
Wegner I, Teber D, Hadaschik B, Pahernik S, Hohenfellner M, Meinzer H-P, Huber J (2012) Pitfalls of electromagnetic tracking in clinical routine using multiple or adjacent sensors. Int J Med Robot Comp 9:268–273
Arun KS, Huang TS and Blostein SD (1987) Least-squares fitting of two 3-d point sets. IEEE Trans Pattern Anal Mach Intell, PAMI-9:698–700
Ikits M, Brederson JD, Hansen CD and Hollerbach JM (2001) An improved calibration framework for electromagnetic tracking devices. In: Proceedings of the IEEE virtual reality. IEEE, pp 63–70
Kindratenko V (2000) A survey of electromagnetic position tracker calibration techniques. Virtual Real 5(3):169–182
Rampersaud YR, Simon DA, Foley KT (2001) Accuracy requirements for image-guided spinal pedicle screw placement. Spine 26(4):352–359
Liu J, Zhang Y, Li Z (2007) Improving the positioning accuracy of a neurosurgical robot system. IEEE/ASME Trans Mechatron 12(5):527–533
Acknowledgments
The authors would like to thank Dr. Abdulaziz Al Qahtani, clinical fellow, for his assistance in collecting data. This work was supported by the Natural Sciences and Engineering Research Council of Canada, and the Canada Foundation for Innovation. Gabor Fichtinger was supported as Cancer Care Ontario Research Chair.
Conflict of interest
Elodie Lugez, Hossein Sadjadi, David Pichora, Randy Ellis, and Gabor Fichtinger declare that they have no conflict of interest.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Lugez, E., Sadjadi, H., Pichora, D.R. et al. Electromagnetic tracking in surgical and interventional environments: usability study. Int J CARS 10, 253–262 (2015). https://doi.org/10.1007/s11548-014-1110-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-014-1110-0