
Abstract
Purpose
Image-guided interventions that use preoperative 3D computed tomography (CT) models are limited by the preoperative segmentation time 3D image and collection of intraoperative registration data. Intraoperative CT imaging can be ergonomically efficient in a direct navigation system if the imaging device is accurately calibrated. A mobile-gantry CT scanner offers improved patient safety but presents technical challenges beyond those of a conventional scanner. The goal was to calibrate an optoelectronic navigation system to mobile-gantry CT with millimeter-level accuracy.
Methods
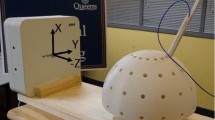
A custom calibration device was designed and manufactured. The calibrator contained optoelectronic markers for navigation reference and radio-opaque markers for CT reference. Calibrations were performed with a ceiling-mounted optoelectronic camera and with a portable camera, and then verified for accuracy.
Results
The component fiducial registration errors were extremely small, being 0.36 mm, with standard deviation of 0.16 mm, for the ceiling-mounted camera, and 0.05 mm, with standard deviation of 0.01 mm, for the portable camera. The net target registration error, measured as RMS deviation, was 1.58 mm for the ceiling-mounted camera and 0.73 mm for the portable camera.
Conclusions
High-accuracy calibration of the mobile-gantry CT scanner was possible from a single preoperative CT image. A ceiling-mounted optoelectronic camera, which is ergonomically preferable, marginally met the accuracy criteria. The portable camera, which is in widespread use for conventional navigated surgery, had deep sub-millimeter error. This study demonstrates that high accuracy is achievable and offers a system developer options to trade off accuracy and user convenience in direct surgical navigation.






Similar content being viewed by others

Notes
Similarly to \(^{H}_{A}T\) and \(^{A}_{I}T\) mentioned earlier, the imaging transform \(^{Y}_{H}T\) was determined using DICOM header “meta-data.”
References
Smith EJ, Al-Sanawi HA, Gammon B, St John PJ, Pichora DR, Ellis RE (2012) Volume slicing of cone-beam computed tomography images for navigation of percutaneous scaphoid fixation. Int J Comput Assist Radiol Surg 7(3):433–444
Foley KT, Simon DA, Rampersaud YR (2001) Virtual fluoroscopy: computer-assisted fluoroscopic navigation. Spine 26(4):347–351
Oentoro A, Ellis RE (2010) High-accuracy registration of intraoperative CT imaging. SPIE Med Imaging 762505–762505
Ritter D, Mitschke M, Graumann R (2002) Markerless navigation with the intra-operative imaging modality SIREMOBIL Iso-C 3D. Electromedica 70(1):31–36
Smith EJ, Oentoro A, Al-Sanawi H, J BGP, St John, Pichora DR, Ellis RE (2010) Calibration and use of intraoperative cone-beam computed tomography: an in-vitro study for wrist fracture. Med Image Comput Comput Assist Interv 359–366
Grutzner PA, Hebecker A, Waelti H, Vock B, Nolte LP, Wentzensen A (2003) Clinical study for registration-free 3D-navigation with the SIREMOBIL Iso-C3D mobile C-arm. Electromedica 71(1):7–16
Hott JS, Deshmukh VR, Klopfenstein JD, Sonntag VKH, Dickman CA, Spetzler RF, Papadopoulos SM (2004) Intraoperative Iso-C C-arm navigation in craniospinal surgery: the first 60 cases. Neurosurg 54(5):1131–1137
Richter M, Geerling J, Zech S, Goesling T, Krettek C (2005) Intraoperative three-dimensional imaging with a motorized mobile C-arm (SIREMOBIL ISO-C-3D) in foot and ankle trauma care: A preliminary report. J Orthop Trauma 19(4):259–266
Kendoff D, Citak M, Gardner MJ, Stuebig T, Krettek C, Huefner T (2009) Intraoperative 3D imaging: value and consequences in 248 cases. J Trauma Acute Care Surg 66(1):232–238
Oentoro A (2009) A system for computer-assisted surgery with intraoperative CT imaging. Master’s thesis, Queen’s University, Kingston
Al-Sanawi H, Gammon B, Sellens RW, St John P, Smith EJ, Ellis RE, Pichora DR (2012) Percutaneous scaphoid fixation using computer-assisted navigation with intraoperatively-acquired images. J Bone Joint Surg [B] 94(SUPP XXXVIII):52–52
Jacob AL, Messmer P, Kaim A, Suhm N, Regazzoni P, Baumann B (2000) A whole-body registration-free navigation system for image-guided surgery and interventional radiology. Invest Radiol 35(5):279–288
Stelter K, Ledderose G, Hempel JM, Morhard DFB, Flatz W, Krause E, Mueller J (2012) Image guided navigation by intraoperative CT scan for cochlear implantation. Comput Aided Surg 17(3):153–160
Belkova A (2013) Calibration of a mobile-gantry computed tomography scanner for surgical navigation. Master’s thesis, Queen’s University, Kingston
Horn BKP (1987) Closed-form solution of absolute orientation using unit quaternions. J Optical Soc Am 4(4):629–642
Besl PJ, McKay ND (1992) Method for registration of 3-D shapes. IEEE Pattern Anal Machine Intell 14(2):239–256
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Human and animal rights
This article does not contain any studies with human participants or animals performed by any of the authors
Additional information
Supported in part by the Canadian Institutes of Health Research, Grant #CHRPJ–398995, and the Natural Sciences and Engineering Research Council of Canada, Grant #DG-43515.
Rights and permissions
About this article

Cite this article
Belkova, A., Pichora, D.R. & Ellis, R.E. Calibration of mobile-gantry computed tomography for surgical navigation. Int J CARS 11, 521–527 (2016). https://doi.org/10.1007/s11548-015-1302-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-015-1302-2