
Abstract
Purpose
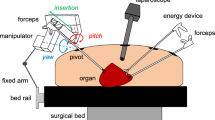
By integrating locally operated small surgical robots in a sterilized area, a surgeon can perform safe and accurate robotically assisted laparoscopic surgery. At present, there is no locally operated compact forceps robot that can operate within a small space while providing a wide working area on the abdominal wall. In the present study, a new spherical-coordinate manipulator with a linear telescopic rail and two circular telescopic rails that can act as a third arm for the surgeon has been developed.
Methods
A compact locally operated detachable end-effector manipulator (LODEM) was developed. This manipulator uses circular telescopic rails with linkage mechanisms for the yaw and pitch axes, and a linear telescopic rail for the insertion/extraction axis is attached to forceps. The dimensions of the manipulator are \(180~\hbox {mm} \times 100~\hbox {mm} \times 90~\hbox {mm}\) when contracted and \(230~\hbox {mm} \times 130~\hbox {mm} \times 120~\hbox {mm}\) when expanded. The positional accuracy, mechanical deflection, and backlash of the prototype were evaluated while performing simulated in vivo laparoscopic surgery.
Results
The positional accuracy, deflection, and backlash of the telescopic rail mechanism were 2.1, 1.8, and 5.1 mm, respectively. The manipulator could successfully handle the target and maintain stability, while the arms of the endoscope specialist were free from collisions with the manipulator during an in vivo laparoscopic surgery.
Conclusions
A compact LODEM was designed to facilitate minimally invasive, robotically assisted laparoscopic surgery by a doctor working near the patient. This device could be used for such applications.










Similar content being viewed by others


References
Guthart GS, Salisbury JJ (2000) The Intuitive telesurgery system: overview and application. In: Proceedings of IEEE ICRA, pp 618–621: doi:10.1109/ROBOT.2000.844121
Taylor RH, Stoianovici D (2003) Medical robotics in computer-integrated surgery. IEEE Trans Robot Autom 19(5):765–781. doi:10.1109/TRA.2003.817058
Torres BJR, Buess G, Waseda M, Gacek I, Becerra GF, Manukyan GA, Inaki N (2009) Laparoscopic intracorporal colorectal sutured anastomosis using the Radius Surgical System in a phantom model. Surg Endosc 23(7):1624–1632. doi:10.1007/s00464-008-9992-y
Nguyen NT, Reavis KM, Hinojosa MW, Smith BR, Wilson SE (2009) Laparoscopic transumbilical cholecystectomy without visible abdominal scars. J Gastrointest Surg 13(6):1125–1128. doi:10.1007/s11605-008-0642-4
Okamoto J, Toyoda K, Muragaki Y, Iseki H, Fujie M, Goto T, Hongo K (2011) Clinical use of neurosurgical arm holding manipulator. Int J CARS 6(Suppl 1):S83–S84
Goto T, Hongo K, Yako T, Hara Y, Okamoto J, Toyoda K, Fujie MG, Iseki H (2013) The concept and feasibility of EXPERT: intelligent armrest using robotics technology. Neurosurgery 72(Suppl 1):39–42. doi:10.1227/NEU.0b013e318271ee66
Gumbs AA, Crovari F, Vidal C, Henri P, Gayet B (2007) Modified robotic lightweight endoscope (ViKY) validation in vivo in a porcine model. Surg Innov 14(4):261–264. doi:10.1177/1553350607310281
Kobayashi E, Masamune K, Sakuma I, Dohi T, Hashimoto D (1999) A new safe laparoscopic manipulator system with a five-bar linkage mechanism and an optimal zoom. CAS 4(4):182–192. doi:10.1007/BFb0056203
Kawai T, Hashida J, Myongsyu S, Nishizawa Y, Nakamura T, Morita N, Murotani T, Mochizuki S (2012) Locally operated detachable end-effector manipulator for endoscopic surgery. J JSCAS 14(1):5–14 (in Japanese)
Kawai T, Shin M, Nishizawa Y, Horise Y, Nisihkawa A, Nakamura T (2015) Mobile locally operated detachable end-effector manipulator for endoscopic surgery. Int J CARS 10(2):161–169. doi:10.1007/s11548-014-1062-4
Bihlmaier A (2016) Learning dynamic spatial relations. Springer Fachmedien Wiesbaden, Wiesbaden. doi:10.1007/978-3-658-14914-7
Gillen S, Pletzer B, Heiligensetzer A, Wolf P, Kleeff J, Feussner H, Fürst A (2014) Solo-surgical laparoscopic cholecystectomy with a joystick-guided camera device: a case–control study. Surg Endosc 28(1):164–170. doi:10.1007/s00464-013-3142-x
AKTORmed GmbH. http://aktormed.info/. Accessed 21 Feb 2017
Kihara K (ed) (2015) Gasless single-port robosurgeon surgery in urology. Springer, Tokyo
RIVERFIELD Inc. http://www.riverfieldinc.com/. Accessed 21 Feb 2017
Stolzenburg JU, Franz T, Kallidonis P, Minh D, Dietel A, Hicks J, Nicolaus M, Al-Aown A, Liatsikos E (2010) Comparison of the FreeHand robotic camera holder with human assistants during endoscopic extraperitoneal radical prostatectomy. BJU Int 107(6):970–974. doi:10.1111/j.1464-410X.2010.09656.x
Freehand 2010 Ltd. http://www.freehandsurgeon.com/. Accessed 21 Feb 2017
ENDOCNTROL. http://www.endocontrol-medical.com/. Accessed 21 Feb 2017
Long JA, Cinquin P, Troccaz J, Voros S, Berkelman P, Descotes JL, Letoublon C, Rambeaud JJ (2007) Development of miniaturized light endoscope-holder robot for laparoscopic surgery. J Endourol 21(8):911–914. doi:10.1089/end.2006.0328
Kawai T, Hayashi H, Nisihkawa A, Nishizawa Y, Nakamura T (2016) Compact forceps manipulator with spherical-coordinate linear and circular telescopic rail mechanism for laparoscopic surgery. Int J CARS 11(Suppl 1):S237–S238
Heijnsdijk EA, Pasdeloup A, Dankelman J, Gouma DJ (2004) The optimal mechanical efficiency of laparoscopic forceps. Surg Endosc 18(12):1766–1770. doi:10.1007/s00464-004-9000-0
Kuo CH, Dai JS (2009) Robotics for minimally invasive surgery: a historical review from the perspective of kinematics. In: International symposium on history of machines and mechanisms. Springer, Berlin, pp 337–354. doi:10.1007/978-1-4020-9485-9_24
Arata J, Tada Y, Kozuka H, Wada T, Saito Y, Ikedo N, Hayashi Y, Fujii M, Kajita Y, Mizuno M, Wakabayashi T, Yoshida J, Fujimoto H (2011) Neurosurgical robotic system for brain tumor removal. Int J CARS 6(3):375–385. doi:10.1007/s11548-010-0514-8
Ida Y, Sugita N, Ueta T, Tamaki Y, Tanimoto K, Mitsuishi M (2012) Microsurgical robotic system for vitreoretinal surgery. Int J CARS 7(1):27–34. doi:10.1007/s11548-011-0602-4
Masamune K, Kobayashi E, Masutani Y, Suzuki M, Dohi T, Iseki H, Takakura K (1995) Development of an MRI-compatible needle insertion manipulator for stereotactic neurosurgery. J Image Guid Surg 1(4):242–248. doi:10.1002/(SICI)1522-712X(1995)1:4<242::AID-IGS7>3.0.CO;2-A
Stoianovici D, Cleary K, Patriciu A, Mazilu D, Stanimir A, Craciunoiu N, Watson V, Kavoussi L (2003) AcuBot: a robot for radiological interventions. IEEE Trans Robot Autom 19(5):927–930. doi:10.1109/TRA.2003.817072
Lum MJ, Rosen J, Sinanan MN, Hannaford B (2006) Optimization of a spherical mechanism for a minimally invasive surgical robot: theoretical and experimental approaches. IEEE Trans Biomed Eng 53(7):1440–1445. doi:10.1109/TBME.2006.875716
Zemiti N, Morel G, Ortmaier T, Bonnet N (2007) Mechatronic design of a new robot for force control in minimally invasive surgery. IEEE/ASME Trans Mechatron 12(2):143–153. doi:10.1109/TMECH.2007.892831
Tadano K, Kawashima K, Kojima K, Tanaka N (2010) Development of a pneumatic surgical manipulator IBIS IV. J Robot Mechatron 22(2):179–188. doi:10.20965/jrm.2010.p0179
Kawai T, Tomokane K, Nishikawa A, Nishizawa Y, Nakamura T (2015) Development of handy switch interface with five-dofs for locally operated forceps manipulator. In: Proceedings of JSMBE, p S204_02. doi:10.11239/jsmbe.53.S204_02
Kawai T, Fukunishi M, Nishikawa A, Nishizawa Y, Nakamura T (2014) Hands-free interface for surgical procedures based on foot movement patterns. Proceedings of IEEE EMBC, pp 345–348. doi:10.1109/EMBC.2014.6943600
Andersen B, Ulrich H, Rehmann D, Kock AK, Wrage JH, Ingenerf J (2015) A gateway for reporting medical device observations to clinical information systems. Int J CARS 10(Suppl 1):S156
Okamoto J, Masamune K, Iseki H, Muragaki Y (2015) Development of a next-generation operating room “Smart Cyber Operating Theater (SCOT)”—development concept and project summary. Int J CARS 10(Suppl 1):S156–S158
Amato C, Ratib O, Lemke H (2015) Intelligent operating rooms: preparing for the new digital patient model challenges. Int J CARS 10(Suppl 1):S160–S161
Kawai T, Matsumoto T, Horise Y, Nishikawa A, Nishizawa Y, Nakamura T (2015) Flexible locally operated end-effector manipulator with actuator interchangeability for single-incision laparoscopic surgery. Int J CARS 10(Suppl 1):S246–S247
Acknowledgements
The preset study was supported in part by JSPS Kakenhi (JP15K05917, JP16H01859) and The National Cancer Center Research and Development Fund (25-A-8, 28-A-10).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there are no conflicts of interest with regard to this study.
Ethical approval
All applicable international, national, and/or institutional guidelines for the care and use of animals were followed. The animal studies were approved by the ethics committee of Chiba University.
Rights and permissions
About this article

Cite this article
Kawai, T., Hayashi, H., Nishizawa, Y. et al. Compact forceps manipulator with a spherical-coordinate linear and circular telescopic rail mechanism for endoscopic surgery. Int J CARS 12, 1345–1353 (2017). https://doi.org/10.1007/s11548-017-1595-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-017-1595-4