
Abstract
Purpose
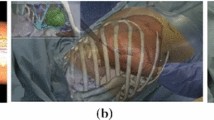
For augmented reality surgical navigation based on C-arm imaging, accuracy of the overlaid augmented reality onto the X-ray image is imperative. However, overlay displacement is generated when a conventional pinhole model describing a geometric relationship of a normal camera is adopted for C-arm calibration. Thus, a modified model for C-arm calibration is proposed to reduce this displacement, which is essential for accurate surgical navigation.
Method
Based on the analysis of displacement pattern generated for three-dimensional objects, we assumed that displacement originated by moving the X-ray source position according to the depth. In the proposed method, X-ray source movement was modeled as variable intrinsic parameters and represented in the pinhole model by replacing the point source with a planar source.
Results
The improvement which represents a reduced displacement was verified by comparing overlay accuracy for augmented reality surgical navigation between the conventional and proposed methods. The proposed method achieved more accurate overlay on the X-ray image in spatial position as well as depth of the object volume.
Conclusion
We validated that intrinsic parameters that describe the source position were dependent on depth for a three-dimensional object and showed that displacement can be reduced and become independent of depth by using the proposed planar source model.











Similar content being viewed by others


References
Hofstetter R, Slomczykowski M, Sati M, Nolte L-P (1999) Fluoroscopy as an imaging means for computer-assisted surgical navigation. Comput Aided Surg 4(2):65–76
Tsai R (1987) A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IEEE J Robot Autom 3(4):323–344
Zhang Z (2000) A flexible new technique for camera calibration. IEEE Trans Pattern Anal Mach Intell 22(11):1330–1334
Huang L, Zhang Q, Asundi A (2013) Camera calibration with active phase target: improvement on feature detection and optimization. Opt Lett 38(9):1446–1448
Wijesoma S, Wolfe D, Richards R (1993) Eye-to-hand coordination for vision-guided robot control applications. Int J Robot Res 12(1):65–78
Daniilidis K (1999) Hand-eye calibration using dual quaternions. Int J Robot Res 18(3):286–298
Ha H-G, Hong J (2016) Augmented reality in medicine. Hanyang Med Rev 36(4):242–247
Fischer J, Neff M, Freudenstein D, Bartz D (2004) Medical augmented reality based on commercial image guided surgery. In: Eurographics symposium on virtual environments (EGVE), pp 83–86
Bertelsen A, Garin-Muga A, Echeverría M, Gómez E, Borro D (2014) Distortion correction and calibration of intra-operative spine X-ray images using a constrained DLT algorithm. Comput Med Imaging Graph 38(7):558–568
Li X, Zhang D, Liu B (2010) A generic geometric calibration method for tomographic imaging systems with flat-panel detectors—a detailed implementation guide. Med Phys 37(7):3844–3854
Meng C, Zhang J, Zhou F, Wang T (2014) New method for geometric calibration and distortion correction of conventional C-arm. Comput Biol Med 52:49–56
Livyatan H, Yaniv Z, Joskowicz L (2002) Robust automatic C-arm calibration for fluoroscopy-based navigation: a practical approach. In: International conference on medical image computing and computer-assisted intervention, Springer, pp 60–68
Navab N, Heining S-M, Traub J (2010) Camera augmented mobile C-arm (CAMC): calibration, accuracy study, and clinical applications. IEEE Trans Med Imaging 29(7):1412–1423
Schumann S, Dong X, Puls M, Nolte L-P, Zheng G (2012) Calibration of C-arm for orthopedic interventions via statistical model-based distortion correction and robust phantom detection. In: 2012 9th IEEE international symposium on biomedical imaging (ISBI), IEEE, pp 1204–1207
Lv S, Meng C, Zhou F, Liu B, Zhou X (2009) Visual model based C-arm system calibration and image correction. In: 2nd international conference on biomedical engineering and informatics, 2009. BMEI’09. IEEE, pp 1–5
Rampersaud YR, Simon DA, Foley KT (2001) Accuracy requirements for image-guided spinal pedicle screw placement. Spine 26(4):352–359
West JB, Fitzpatrick JM, Toms SA, Maurer CR Jr, Maciunas RJ (2001) Fiducial point placement and the accuracy of point-based, rigid body registration. Neurosurgery 48(4):810–817
Sielhorst T, Feuerstein M, Navab N (2008) Advanced medical displays: a literature review of augmented reality. J Display Technol 4(4):451–467
Miao H, Wu X, Zhao H, Liu H (2012) A phantom-based calibration method for digital x-ray tomosynthesis. J X-Ray Sci Technol 20(1):17–29
Lourakis MI (2005) A brief description of the Levenberg–Marquardt algorithm implemented by Levmar. Found Res Technol 4(1):1–6
Phillips R (2007) The accuracy of surgical navigation for orthopaedic surgery. Curr Orthop 21(3):180–192
Funding
This work was supported by the Technology Innovation Program (No. 10063309, Development of high-precision modular restoration system for fracture reduction and bone deformity correction) funded by the Ministry of Trade, industry & Energy (MOTIE, Korea) and by the Robot industry fusion core technology development project through the Korea Evaluation Institute of Industrial Technology (KEIT) funded by the Ministry of Trade, Industry and Energy of Korea (MOTIE) (No. 10052980).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors.
Informed consent
This article does not contain patient data.
Rights and permissions
About this article

Cite this article
Ha, HG., Jeon, S., Lee, S. et al. Perspective pinhole model with planar source for augmented reality surgical navigation based on C-arm imaging. Int J CARS 13, 1671–1682 (2018). https://doi.org/10.1007/s11548-018-1823-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-018-1823-6