
Abstract
Purpose
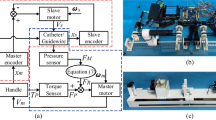
Robot-assisted cardiovascular intervention has been recently developed, which enables interventionists to avoid x-ray radiation and improve their comfort. However, there are still some challenges in the robotic design, such as the inability of the interventionist to freely perform natural clinical techniques and the limited motion travel of the interventional tool. To overcome these challenges, this paper proposes an ergonomically designed dual-use mechanism for cardiovascular intervention (DMCI).
Methods
DMCI can work as an ergonomic interface or a compact slave robot with unlimited motion travel. Our kinematic analysis of DMCI includes motion decoupling and coupling. Motion decoupling decomposes the translation and rotation from the interventionist’s natural clinical actions at the master side. Motion coupling can calculate the input pulses of motors according to the desired rotation and translation, thus composing the motion of the intervention tool at the slave side.
Results
Our kinematic analysis of DMCI has been experimentally verified, where the overall mean rotational errors are all less than 1° and translational errors are all less than 1 mm. We also evaluated the performance of the DMCI-based master–slave system, where the overall rotational and translational errors are 0.821 ± 0.753° and 0.608 ± 0.512 mm. Moreover, operators were found to be generally more efficient when using the DMCI-based interface compared to the conventional joystick.
Conclusion
We have validated our kinematic analysis of DMCI. The master–slave teleoperation experiment demonstrated that operators can freely perform natural clinical techniques through the DMCI-based interface, and the slave robot can replicate the operators’ manipulation at the master side well.









Similar content being viewed by others


Explore related subjects
Discover the latest articles and news from researchers in related subjects, suggested using machine learning.References
Mensah GA, Roth GA, Fuster V (2019) The global burden of cardiovascular diseases and risk factors: 2020 and beyond vol 74. American College of Cardiology Foundation Washington, DC, 2019, pp 2529–2532. https://doi.org/10.1007/s10544-018-0261-0
Moore K, Kunin J, Alnijoumi M, Nagpal P, Bhat AP (2021) Current endovascular treatment options in acute pulmonary embolism. J Clin Imag Sci 11:1. https://doi.org/10.1177/0954411916679328
Püschel A, Schafmayer C, Groß J (2022) Robot-assisted techniques in vascular and endovascular surgery. Langenbeck’s Arch Surg 1:1–7. https://doi.org/10.1109/IROS.2018.8593628
Bassil G, Markowitz SM, Liu CF, Thomas G, Ip JE, Lerman BB, Cheung JW (2020) Robotics for catheter ablation of cardiac arrhythmias: Current technologies and practical approaches. J Cardiovasc Electrophysiol 31(3):739–752. https://doi.org/10.1016/j.ijcard.2015.10.049
Dagnino G, Liu J, Abdelaziz ME, Chi W, Riga C, Yang G-Z (2018) Haptic feedback and dynamic active constraints for robot-assisted endovascular catheterization. In: 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, pp 1770–1775. https://doi.org/10.1109/ICMA.2016.7558688
Datino T, Arenal A, Ruiz-Hernández P, Pelliza M, Hernández-Hernández J, González-Torrecilla E, Atienza F, Ávila P, Fernández-Avilés F (2016) Arrhythmia ablation using the amigo robotic remote catheter system versus manual ablation: one year follow-up results. Int J Cardiol 202:877–878. https://doi.org/10.1007/s00270-020-02759-0
Cha H-J, Yi B-J, Won JY (2017) An assembly-type master–slave catheter and guidewire driving system for vascular intervention. Proc Inst Mech Eng Part H J Eng Med 231(1):69–79. https://doi.org/10.1155/2020/8870106
Abdelaziz ME, Kundrat D, Pupillo M, Dagnino G, Kwok TM, Chi W, Groenhuis V, Siepel FJ, Riga C, Stramigioli S (2019) Toward a versatile robotic platform for fluoroscopy and mri-guided endovascular interventions: a pre-clinical study. In: 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, pp 5411–5418. https://doi.org/10.1136/neurintsurg-2017-013284. https://doi.org/10.1136/neurintsurg-2017-013284
Ma X, Zhou J, Zhang X, Zhou Q (2020) Development of a robotic catheter manipulation system based on BP neural network PID controller. Appl Bion Biomech 2020:1. https://doi.org/10.1002/rcs.1494
Wang K, Liu J, Yan W, Lu Q, Nie S (2021) Force feedback controls of multi-gripper robotic endovascular intervention: design, prototype, and experiments. Int J Comput Assist Radiol Surg 16(1):179–192. https://doi.org/10.1016/j.jacc.2019.10.009
Patel TM, Shah SC, Pancholy SB (2019) Long distance tele-robotic-assisted percutaneous coronary intervention: a report of first-in-human experience. EClinicalMedicine 14:53–58. https://doi.org/10.1007/s12555-018-0089-7
Rosa B, Devreker A, De Praetere H, Gruijthuijsen C, Portoles-Diez S, Gijbels A, Reynaerts D, Herijgers P, Vander Sloten J, Vander Poorten E (2015) Intuitive teleoperation of active catheters for endovascular surgery. In: 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, pp 2617–2624. https://doi.org/10.25259/JCIS_229_2020.
Tanimoto M, Arai F, Fukuda T, Itoigawa K, Hashimoto M, Takahashi I, Negoro M (2000) Telesurgery system for intravascular neurosurgery. In: International conference on medical image computing and computer-assisted intervention. Springer, pp 29–39. https://doi.org/10.1016/j.eclinm.2019.07.017
Sankaran NK, Chembrammel P, Kesavadas T (2020) Force calibration for an endovascular robotic system with proximal force measurement. Int J Med Robot Comput Assist Surg 16(2):e2045. https://doi.org/10.1109/IROS.2012.6386149
Jones B, Riga C, Bicknell C, Hamady M (2021) Robot-assisted carotid artery stenting: a safety and feasibility study. Cardiovasc Interv Radiol 44(5):795–800. https://doi.org/10.1007/s00423-022-02465-0
Shen H, Wang C, Xie L, Zhou S, Gu L, Xie H (2018) A novel remote-controlled robotic system for cerebrovascular intervention. Int J Med Robot Comput Assist Surg 14(6):1943. https://doi.org/10.1109/IROS.2015.7353734
Meng C, Zhang J, Liu D, Liu B, Zhou F (2013) A remote-controlled vascular interventional robot: system structure and image guidance. Int J Med Robot Comput Assist Surg 9(2):230–239. https://doi.org/10.1016/j.jacc.2020.11.010
Scarà A, Sciarra L, De Ruvo E, Borrelli A, Grieco D, Palamà Z, Golia P, De Luca L, Rebecchi M, Calò L (2018) Safety and feasibility of atrial fibrillation ablation using Amigo® system versus manual approach: a pilot study. Indian Pacing Electrophysiol J 18(2):61–67. https://doi.org/10.1109/TBME.2018.2800639
Payne CJ, Rafii-Tari H, Yang G-Z (2012) A force feedback system for endovascular catheterization. In: 2012 IEEE/RSJ international conference on intelligent robots and systems. IEEE, pp 1298–1304. https://doi.org/10.1016/j.ipej.2017.10.001
Moon Y, Hu Z, Won J, Park S, Lee H, You H, Nam G-B, Choi J (2018) Novel design of master manipulator for robotic catheter system. Int J Control Autom Syst 16(6):2924–2934. https://doi.org/10.1002/rcs.1943
Tavallaei MA, Lavdas M, Gelman D, Drangova M (2016) Magnetic resonance imaging compatible remote catheter navigation system with 3 degrees of freedom. Int J Comput Assist Radiol Surg 11(8):1537–1545. https://doi.org/10.1007/978-3-540-40899-4_4
Sankaran NK, Chembrammel P, Siddiqui A, Snyder K, Kesavadas T (2018) Design and development of surgeon augmented endovascular robotic system. IEEE Trans Biomed Eng 65(11):2483–2493. https://doi.org/10.1002/rcs.1711
Wang T, Zhang D, Da L (2010) Remote-controlled vascular interventional surgery robot. Int J Med Robot Comput Assist Surg 6(2):194–201. https://doi.org/10.1007/s11548-015-1337-4
Tavallaei MA, Gelman D, Lavdas MK, Skanes AC, Jones DL, Bax JS, Drangova M (2016) Design, development and evaluation of a compact telerobotic catheter navigation system. Int J Med Robot Comput Assist Surg 12(3):442–452. https://doi.org/10.1007/s11548-020-02278-w
Bao X, Guo S, Xiao N, Li Y, Yang C, Jiang Y (2018) A cooperation of catheters and guidewires-based novel remote-controlled vascular interventional robot. Biomed Microdev 20(1):1–19. https://doi.org/10.1002/rcs.306
Funding
This research was partially supported by the Beijing Municipal Natural Science Foundation (L192006), the National Key research and development program (2016YFC0106200), and the 863 national research fund (2015AA043203), and the funding from IMR of SJTU.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors.
Informed consent
This article does not contain patient data.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Supplementary file1 (MP4 98211 KB)
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Peng, W., Wang, Z., Xie, H. et al. Design, development and evaluation of an ergonomically designed dual-use mechanism for robot-assisted cardiovascular intervention. Int J CARS 18, 205–216 (2023). https://doi.org/10.1007/s11548-022-02755-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-022-02755-4