
Abstract
Purpose
The complex and elaborate structure of the urinary system presents surgeons with difficulty in using a ureteroscope with a fixed optical fiber to reach the targeted calculus. To address this challenge, a robotic device is required to control the direction of laser irradiation position independently in ureteroscopes.
Method
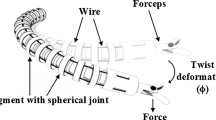
A continuum robotic device was designed and fabricated. The device is constructed with three slackened shape memory alloy (SMA) wires to control the laser irradiation position of the optical fiber combined with the view of the camera on the tip of the ureteroscope. Kinematics analysis and experimental evaluation reveal the capability of the device.
Results
The structure of the device is the same as a single-joint continuum robot. This device is unique because of the tiny diameter of 1.1 mm which can be used inside the ureteroscope through a Ø1.2 mm inner channel into the kidney for transurethral ureterolithotripsy. Kinematic analysis revealed the relationship among space coordinates, angles of bending, and direction and SMA wires length. The maximum bending angle was around 25° when the current value was 350 mA on a single SMA wire. The device could achieve multi-directional bending by allocating the values of current on SMA wires, separately.
Conclusion
This device offers a major advancement in small size and dexterity in medical robotics. Combined with a proper control system, this device could simplify the operation and improve the efficiency of the transurethral ureterolithotripsy.





















Similar content being viewed by others


References
Edvardsson VO, Indridason OS, Haraldsson G, Kjartansson O, Palsson R (2013) Temporal trends in the incidence of kidney stone disease. Kidney Int 83(1):146–152. https://doi.org/10.1038/ki.2012.320
Oberlin DT, Flum AS, Bachrach L et al (2015) Contemporary surgical trends in the management of upper tract calculi. J Urol 193(3):880–884. https://doi.org/10.1016/j.juro.2014.09.006
Papatsoris AG, Varkarakis I, Dellis A, Deliveliotis C (2006) Bladder lithiasis: from open surgery to lithotripsy. Urol Res 34(3):163–167. https://doi.org/10.1007/s00240-006-0045-5
Kikuchi N, Haga Y, Maeda M, Makishi W, Esashi M (2003) Piezolectric 2D micro scanner for minimally invasive therapy fabricated using femtosecond laser ablation. In TRANSDUCERS'03. 12th International Conference on Solid-State Sensors, Actuators and Microsystems. Digest of Technical Papers (Cat. No. 03TH8664) (Vol 1, pp 603–606). IEEE. https://doi.org/10.1109/SENSOR.2003.1215545
da Veiga T, Chandler JH, Lloyd P et al (2020) Challenges of continuum robots in clinical context: a review[J]. Prog Biomed Eng 2(3):032003. https://doi.org/10.1088/2516-1091/ab9f41
Burgner-Kahrs J, Rucker DC, Choset H (2015) Continuum robots for medical applications: a survey. IEEE Trans Rob 31(6):1261–1280. https://doi.org/10.1109/TRO.2015.2489500
Ruiz S, Mead B, Palmre V, Kim KJ, Yim W (2014) A cylindrical ionic polymer-metal composite-based robotic catheter platform: modeling, design and control. Smart Mater Struct 24(1):015007. https://doi.org/10.1088/0964-1726/24/1/015007
Ikuta K, Ichikawa H, Suzuki K (2002) Safety-active catheter with multiple-segments driven by micro-hydraulic actuators. In International Conference on Medical Image Computing and Computer-Assisted Intervention (pp. 182–191). Springer, Berlin, Heidelberg. https://doi.org/10.1007/3-540-45786-0_23
Tang WC, Nguyen TCH, Howe RT (1989) Laterally driven polysilicon resonant microstructures. Sens actuators 20(1–2):25–32. https://doi.org/10.1016/0250-6874(89)87098-2
Yang F, Babaiasl M, Swensen JP (2019) Fracture-directed steerable needles. J Med Robot Res 4(01):1842002. https://doi.org/10.1142/S2424905X18420023
Riojas KE, Hendrick RJ, Webster RJ (2018) Can elastic instability be beneficial in concentric tube robots?[J]. IEEE Robot Automation Lett 3(3):1624–1630. https://doi.org/10.1109/LRA.2018.2800779
Oliver-Butler K, Till J, Rucker C (2019) Continuum robot stiffness under external loads and prescribed tendon displacements. IEEE Trans Rob 35(2):403–419. https://doi.org/10.1109/TRO.2018.2885923
Ahmed S, Gilbert HB (2022) Kinestatic modeling of a spatial screw-driven continuum robot. IEEE Robot Automation Lett 7(2):3563–3570. https://doi.org/10.1109/LRA.2022.3143896
Makishi W, Matunaga T, Haga Y, Esashi M (2006) Active bending electric endoscope using shape memory alloy coil actuators. In The First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics. BioRob 2006, pp. 217–219. IEEE. https://doi.org/10.1109/BIOROB.2006.1639088
Mineta T, Haga Y, Esashi M (2003) Non-planer photo-fabrication of an actuator-unit from a shape memory alloy Pipe. IEE J Trans Sens Micromach 123(5):158–162. https://doi.org/10.1541/ieejsmas.123.158
Motzki P, Khelfa F, Zimmer L, Schmidt M, Seelecke S (2019) Design and validation of a reconfigurable robotic end-effector based on shape memory alloys. IEEE/ASME Trans Mechatron 24(1):293–303. https://doi.org/10.1109/TMECH.2019.2891348
Kode VRC, Cavusoglu MC (2007) Design and characterization of a novel hybrid actuator using shape memory alloy and dc micromotor for minimally invasive surgery applications. IEEE/ASME Trans Mechatron 12(4):455–464. https://doi.org/10.1109/TMECH.2007.901940
Ikuta K, Tsukamoto M, Hirose S (1988) Shape memory alloy servo actuator system with electric resistance feedback and application for active endoscope. In: Proceedings IEEE International Conference on robotics and automation (pp. 427–430). https://doi.org/10.1109/ROBOT.1988.12085
Kim Y, Desai J P. Design and kinematic analysis of a neurosurgical spring-based continuum robot using SMA spring actuators. 2015 IEEE/RSJ International Conference on intelligent robots and systems (IROS). IEEE, 2015: 1428–1433. https://doi.org/10.1109/IROS.2015.7353555.
Cheng SS, Kim Y, Desai JP (2017) New actuation mechanism for actively cooled SMA springs in a neurosurgical robot. IEEE Trans Rob 33(4):986–993. https://doi.org/10.1109/TRO.2017.2679199
Fried NM, Irby PB (2018) Advances in laser technology and fibre-optic delivery systems in lithotripsy. Nat Rev Urol 15(9):563–573. https://doi.org/10.1109/ICRA48506.2021.9561113
Zheng T, Yang Y, Branson DT et al (2014) Control design of shape memory alloy based multi-arm continuum robot inspired by octopus. 9th IEEE Conference on industrial electronics and applications. IEEE, 2014: 1108–1113. https://doi.org/10.1109/ICIEA.2014.6931331
Mandolino MA, Goergen Y, Motzki P et al (2022) Design and Characterization of a Fully Integrated Continuum Robot Actuated by Shape Memory Alloy Wires. IEEE 17th International Conference on advanced motion control (AMC). IEEE, 2022: 6–11. https://doi.org/10.1109/AMC51637.2022.9729267
Mc Caffrey C, Umedachi T, Jiang W et al (2020) Continuum robotic caterpillar with wirelessly powered shape memory alloy actuators. Soft Rob 7(6):700–710. https://doi.org/10.1089/soro.2019.0090
Wang Q, Yan L, Li M et al (2021) Reliability Analysis of Continuum Robot Actuated by Shape Memory Alloy (SMA). 6th International Conference on Automation, control and robotics engineering (CACRE). IEEE, 2021: 97–101. https://doi.org/10.1109/CACRE52464.2021.9501368
Tachioka T, Matsunaga T, Tanahashi Y, Kobayashi T, Haga Y (2018) Bending mechanism using SMA wires for transurethral lithotripsy. IEEJ Trans Sens Micromach 138(2):41–47. https://doi.org/10.1541/ieejsmas.138.41
Al-Qahtani SM, Geavlette BP, de Medina SGD et al (2011) The new Olympus digital flexible ureteroscope (URF-V): initial experience. Urology annals 3(3):133. https://doi.org/10.4103/0974-7796.84963
Standring S (2016) “Ureter”. Gray's anatomy: the anatomical basis of clinical practice (41st ed). Philadelphia. pp 1251–1254
Abelson B, Sun D, Que L et al (2018) Sex differences in lower urinary tract biology and physiology. Biol Sex Differ 9(1):1–13. https://doi.org/10.1186/s13293-018-0204-8
Kato T, Okumura I, Kose H et al (2016) Tendon-driven continuum robot for neuroendoscopy: validation of extended kinematic mapping for hysteresis operation. Int J Comput Assist Radiol Surg 11(4):589–602. https://doi.org/10.1007/s11548-015-1310-2
Jong Yoon W, Velasquez CA, White LW et al (2014) Preliminary articulable probe designs with RAVEN and challenges: image-guided robotic surgery multitool system. J Med Devices. https://doi.org/10.1115/1.4025908
Black KM, Aldoukhi AH, Ghani KR (2019) A users guide to holmium laser lithotripsy settings in the modern era. Front Surg 6:48. https://doi.org/10.3389/fsurg.2019.00048
Acknowledgements
This work was supported by JST SPRING, Grant Number JPMJSP2114.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
All authors confirm that there are no known conflicts of interest with this publication.
Ethical approval
For this type of study, formal consent is not required.
Informed consent
This article does not contain patient data.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Liu, W., Tsuruoka, N., Tanahashi, Y. et al. Design and kinematics of a tube-shaped multidirectional bending robotic device using slackened SMA wires for transurethral ureterolithotripsy. Int J CARS 18, 29–43 (2023). https://doi.org/10.1007/s11548-022-02756-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-022-02756-3