
Abstract
Purpose
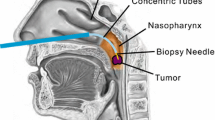
Continuum robots (CRs) have been developed for maxillary sinus surgery (MSS) in recent years. However, due to the anatomically curved and narrow pathway of the maxillary sinus and the deformable characteristics of the CR, it is still a challenge to accurately approach the target in the sinus. Thus, the CR-assisted MSS demands further research, whether in robotic system design or in reliable motion control.
Methods
A continuum robotic system integrated with essential instruments and sensors for MSS is developed, and the path tracking control of the designed CR is studied. The differential kinematic model of the CR is constructed. By analyzing the potential problem of the traditional Jacobian-based control, an iterative Jacobian transpose-based closed-loop control method is proposed to improve the path tracking performance. To validate the design of the CR and the effectiveness of the proposed control scheme, different groups of experiments are performed.
Results
With the proposed method, the path tracking performance of the CR is improved. Compared with the open-loop Jacobian transpose-based control method, the path tracking error of the proposed method is much less. The maxillary sinus phantom tests are conducted to verify the reachability of the designed CR. Given the reference path from the nostril to the target in the maxillary sinus phantom, experiments show a mean error of 0.96 mm.
Conclusions
The designed CR is slender, flexible, and able to smoothly approach the target in a tortuous and constrained environment without colliding with or damaging the surrounding tissue. The designed continuum robotic system and the proposed iterative Jacobian transpose-based closed-loop control strategy have great potential for MSS. The limitations of the proposed method are also discussed.











Similar content being viewed by others

References
Bell GW, Joshi BB, Macleod RI (2011) Maxillary sinus disease: diagnosis and treatment. Br Dent J 210(3):113–118. https://doi.org/10.1038/sj.bdj.2011.47
Burgner-Kahrs J, Rucker DC, Choset H (2015) Continuum robots for medical applications: a survey. IEEE Trans Robot 31(6):1261–1280. https://doi.org/10.1109/TRO.2015.2489500
Thomas TL, Venkiteswaran VK, Ananthasuresh GK, Misra S (2021) Surgical applications of compliant mechanisms: a review. J Mech Robot 13(2):020801. https://doi.org/10.1115/1.4049491
Shu X, Chen Q, Xie L (2021) A novel robotic system for flexible ureteroscopy. Int J Med Robot Comput Assist Surg 17(1):2191. https://doi.org/10.1002/rcs.2191
Xu K, Zhao J, Fu M (2015) Development of the SJTU unfoldable robotic system (SURS) for single port laparoscopy. IEEE/ASME Trans Mechatron 20(5):2133–2145. https://doi.org/10.1109/TMECH.2014.2364625
Hwang M, Kwon D-S (2019) Strong continuum manipulator for flexible endoscopic surgery. IEEE/ASME Trans Mechatron 24(5):2193–2203. https://doi.org/10.1109/TMECH.2019.2932378
Hong W, Xie L, Liu J, Sun Y, Li K, Wang H (2018) Development of a novel continuum robotic system for maxillary sinus surgery. IEEE/ASME Trans Mechatron 23(3):1226–1237. https://doi.org/10.1109/TMECH.2018.2818442
Yoon H, Jeong JH, Yi B (2018) Image-guided dual master–slave robotic system for maxillary sinus surgery. IEEE Trans Robot 34(4):1098–1111. https://doi.org/10.1109/TRO.2018.2830334
Li M, Kang R, Branson DT, Dai JS (2018) Model-free control for continuum robots based on an adaptive Kalman filter. IEEE/ASME Trans Mechatron 23(1):286–297. https://doi.org/10.1109/TMECH.2017.2775663
G. Thuruthel T, Ansari Y, Falotico E (2018) Control strategies for soft robotic manipulators: a survey. Soft Robot 5(2):149–163. https://doi.org/10.1089/soro.2017.0007
Hannan MW, Walker ID (2003) Kinematics and the implementation of an elephant’s trunk manipulator and other continuum style robots. J Robot Syst 20(2):45–63. https://doi.org/10.1002/rob.10070
Webster RJ, Jone BA (2010) Design and kinematic modeling of constant curvature continuum robots: a review. Int J Robot Res 29(13):1661–1683. https://doi.org/10.1177/0278364910368147
Siciliano B, Sciavicco L, Villani L, Oriolo G (2010) Robotics: modeling, planning and control. Springer, New York, pp 132–137. https://doi.org/10.1007/978-1-84628-642-1
Wampler CW (1986) Manipulator inverse kinematic solutions based on vector formulations and damped least-squares methods. IEEE Trans Syst Man Cybern SMC 16(1):93–101. https://doi.org/10.1109/TSMC.1986.289285
Buss SR, Kim J (2005) Selectively damped least squares for inverse kinematics. J Graph Tools 10(3):37–49
Sugihara T (2011) Solvability-unconcerned inverse kinematics by the Levenberg–Marquardt method. IEEE Trans Robot 27(5):984–991. https://doi.org/10.1109/TRO.2011.2148230
Lian S, Han Y, Wang Y, Bao Y, Xiao H, Li X, Sun N (2017) Accelerating inverse kinematics for high-dof robots. In: Proceedings of the 54th annual design automation, p 59. https://doi.org/10.1145/3061639.3062223
Colom A, Torras C (2015) Closed-loop inverse kinematics for redundant robots: comparative assessment and two enhancements. IEEE/ASME Trans Mechatron 20(2):944–955. https://doi.org/10.1109/TMECH.2014.2326304
Xu R, Asadian A, Naidu AS, Patel RV (2013) Position control of concentric-tube continuum robots using a modified Jacobian-based approach. In: Proceedings of the IEEE IEEE international conference on robotics and automation, pp 5813–5818. https://doi.org/10.1109/ICRA.2013.6631413
Li M, Kang R, Geng S, Guglielmino E (2018) Design and control of a tendon-driven continuum robot. Trans Inst Meas Control 40(11):3263–3272. https://doi.org/10.1177/0142331216685607
Liu T, Jackson R, Franson D, Poirot NL, Criss RK, Seiberlich N, Griswold MA, Cavusoglu MC (2017) Iterative Jacobian-based inverse kinematics and open-loop control of an MRI-guided magnetically actuated steerable catheter system. IEEE/ASME Trans Mechatron 22(4):1765–1776. https://doi.org/10.1109/TMECH.2017.2704526
Buss SR (2004) Introduction to inverse kinematics with Jacobian transpose, pseudoinverse and damped least squares methods, pp 1–19. [Online] Available: https://mathweb.ucsd.edu/~sbuss/ResearchWeb/ikmethods/iksurvey.pdf
Funding
This work was supported in part by the National Natural Science Foundation of China (Grant 62133009, Grant 61973211, and Grant M-0221), in part by the Science and Technology Commission of Shanghai Municipality (Grant 21550714200 and Grant 20DZ2220400), in part by the project of Institute of Medical Robotics of Shanghai Jiao Tong University, in part by the Foreign Cooperation Project of Fujian Province Science and Technology Program (Grant 2022I0041), in part by the Project of Quanzhou High-level Talent Innovation and Entrepreneurship (Grant 2021C003R), in part by the Hospital-local Cooperation Project of Xuhui District Artificial Intelligence Medical (Grant 2021-008), and in part by the Joint Project of Xinhua Hospital and Institute of Medical Robotics of Shanghai Jiao Tong University(Grant 21XJMR03).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
All authors declare that there is no conflict of interest.
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Cao, Y., Liu, Z., Liu, Z. et al. Design and path tracking control of a continuum robot for maxillary sinus surgery. Int J CARS 18, 753–761 (2023). https://doi.org/10.1007/s11548-022-02820-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-022-02820-y