
Abstract
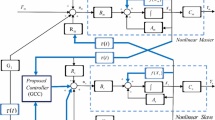
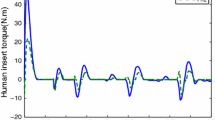
In this paper, a new bilateral control algorithm based on absolute stability theory is put forward, which aims at the time-delay teleoperation system with force feedback from the slave directly. In the new control algorithm, the delay-dependent stability, instead of delay-independent stability, is taken as the aim of control design. It improves the transparency of the system at the price of unnecessary stability. With this algorithm, the time-delay teleoperation systems have good transparency and stability. A simulation system is established to verify the effect of this algorithm.
Similar content being viewed by others

References
R. J. Anderson, M. W. Spong. Bilateral Control of Teleoperators with Time Delay. IEEE Transactions on Automatic Control, vol. 34, no. 5, pp. 494–501, 1989.
Niemeyer. G. Using Wave Variables in Time Delayed Force Reflecting Teleoperation. Ph.D. dissertation, Massachusetts Institute of Technology, USA, 1996.
Niemeyer. G, J. J. E. Slotine. Using Wave Variables for System Analysis and Robot Control. In Proceedings of IEEE international Conference on Robotics and Automation, IEEE Press, Albuquerque, New Mexico, USA, pp. 1619–1625, 1997
Niemeyer. G, J. J. E. Slotine, Stable Adaptive Teleoperation. IEEE Journal of Oceanic Engineering, vol. 16, no. 1, pp. 152–162, 1991.
Park. J. H, H. C. Cho. Sliding-mode Controller for Bilateral Teleoperation with Varying Time Delay. In Proceedings of IEEE International Conference on Advanced Intelligent Mechatronics, IEEE Press, Detroit, Michigan, USA, pp. 311–316, 1999.
Cho. H. C, J. H. Park. Impedance Controller Design of Internet-based Teleoperation Using Absolute Stability Concept. In Proceedings of IEEE International Conference on Intelligent Robots and Systems, IEEE Press, Washington, DC, USA, pp. 2256–2261, 2002.
Imaida. T, Yokokohji. Y, Doi. T, Oda. M, Yoshikawa. T. Ground-Space Bilateral Teleoperation Experiment Using ETS-VII Robot Arm with Direct Kinesthetic Coupling. In Proceedings of IEEE International Conference on Robotics and Automation, IEEE Press, Albuquerque, New Mexico, USA, pp. 1031–1038, 2001.
Qiwen Deng, Qing Wei, Zexiang Li. Force-reflection Bilateral Control System with Large Time Delay. Robot, vol. 27, no. 5, pp. 410–419, 2006.
Lawrence D. A. Stability and Transparency in Bilateral Teleoperation. IEEE Transactions on Robotics and Automation, pp. 624–637, 1993.
Huikai Chen, Xinyu Wu, Shumei Wu. Modern Network Analyzing. Peoples Posts and Telecommunication Publishing House, Beijing, 1992.
Hashtrudi-Zaad. K, Salcudean. S. E. Analysis and Evaluation of Stability and Performance Robustness for Teleoperation Control Architectures. In Proceedings of IEEE International Conference on Robotics and Automation, IEEE Press, San Francisco, USA, pp. 3107–3113, 2000.
Dede. M. I. C, S. Tosunoglu, D. W. Repperger. A Study on Multiple Degree-of-freedom Force Reflecting Teleoperation. In Proceedings of IEEE International Conference on Mechatronics, IEEE Press, Detroit, Michigan, USA, pp. 476–481, 2004.
Dede. M. I. C, S. Tosunoglu, D. W. Repperger. Effects of Time Delay on Force-feedback Teleoperation Systems. In Proceedings of IEEE International Conference on Control Automation, IEEE Press, Kusadasi, Aydin, Turkey, pp. 476–481, 2004.
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by 863 Program of PRC (No. 2002AA742045).
Qi-Wen Deng received his B. Sc. and the M. Sc. degrees from National University of Defense Technology (NUDT), China, in 1999 and 2002, respectively. He is currently pursuing a Ph. D. degree in NUDT.
His research interests include robotics and automation, especially the control of teleoperate system and space robot.
Qing Wei received his B.Sc. degree from Fudan University, China, in 1990 and the Ph.D. degree from the National University of Defense Tenology (NUDT), China, in 1995. He is currently a professor at the Laboratory of Robot, NUDT.
His research interests include robotics and automation, especially the control of teleoperate robot and intelligent control.
Ze-Xiang Li received his B. Sc. degree in electrical engineering and economics (with honours) from Carnegie-Mellon University, MA degree in mathematics and Ph. D. degree in electrical engineering and computer science from the University of California at Berkeley.
His research interests include robot manipulation, multifingered robotic hands, geometric analysis of robotic mechanisms, intelligent control and nonlinear systems, CAD/CAM and computational metrology.
Rights and permissions
About this article
Cite this article
Deng, QW., Wei, Q. & Li, ZX. Analysis of absolute stability for time-delay teleoperation systems. Int J Automat Comput 4, 203–207 (2007). https://doi.org/10.1007/s11633-007-0203-4
Received:
Revised:
Issue Date:
DOI: https://doi.org/10.1007/s11633-007-0203-4