
Abstract
This paper is concerned with the problem of global output feedback stabilization in probability for a class of switched stochastic nonlinear systems under arbitrary switchings. The subsystems are assumed to be in output feedback form and driven by white noise. By introducing a common Lyapunov function, the common output feedback controller independent of switching signals is constructed based on the backstepping approach. It is proved that the zero solution of the closed-loop system is fourth-moment exponentially stable. An example is given to show the effectiveness of the proposed method.
Similar content being viewed by others

1 Introduction
Switched control systems have drawn considerable attention for the past decades since they play an essential role in numerous applications such as mechanical systems, air traffic control systems, etc.[1–3]. Recently some attempts on switched systems have been investigated theoretically[4–6]. In the existing literatures, the study of switched nonlinear systems mainly focuses on stability and stabilization under arbitrary switchings[7–9] or under some designed switching law[10,11]. The stability for arbitrary switching sequences is, in fact, a kind of robustness. On the other hand, stochastic nonlinear systems have been widely studied in theory and applied in practice. In the constructive methods for stabilization of stochastic nonlinear systems, the usage of Lya-punov functions can be mainly divided into two types: One is quadratic Lyapunov functions[12–14], and the other is the quartic Lyapunov function which can sometimes result in a more simple design algorithm than the former one[15,16]. As an intersecting issue of the above two aspects, switched stochastic nonlinear systems have become an emerging hot research topic for the past decade. These researches are not only interesting and challenging, but also theoretically and practically significant[17–20].
As is known to all, the output feedback control is one of the most important problems of nonlinear systems since only the plant output can be measured in many cases. Generally speaking, the separation principle does not work for nonlinear systems. This makes the design of output feedback control complicated and difficult. Thus, it motivated many scholars to work on this interesting topic. Nale et al.[21] investigated the stability of switched systems with output feedback control methodology. Deng and Krstic[22] concentrated on the output feedback stabilization of stochastic nonlinear systems. Wu[23] further considered the backstepping control problem of stochastic nonlinear systems with Markovian switching, where the subsystems were assumed to be in the output feedback form. The nonlinear systems in the output feedback form are a kind of significant nonlinear systems. The feedback controllers of such a kind of nonlinear systems can be constructed systematically by the backstepping approach and its variations[24–28].
In this paper, we are interested in stability analysis and control synthesis of switched stochastic nonlinear systems under arbitrary switchings. Compared to full state feedback control problem, the design of the output feedback turns out to be much more difficult. By adopting the backstepping design used in [22], we extended the output feedback design problem of the stochastic systems in the strict-feedback form to a more general class of the switched stochastic nonlinear systems. In the switched systems, multiple Lyapunov functions are often employed to satisfy different performance requirements for individual subsystems. And a set of switching laws are then designed to guarantee stability of the overall switched closed-loop system. Although the existence of multiple Lyapunov functions is less conservative, a common Lyapunov function is necessary for asymptotic stability under arbitrary switching. It is uniform over the set of all switching signals for all the subsystems. In addition, the controller can not be dependent on switching signals because the nonlinear systems we studied here are under arbitrary switchings, and the switching signals are unknown a priori. So a common output feedback controller independent of switching signals is constructed in the paper such that the equilibrium at the origin of the closed-loop system is stable.
2 Problem formulation
Consider the following class of switched stochastic nonlinear systems

where x i , u and y are the state variable, the input and the outputs of the system, respectively. σ (t) : [0, +∞) → {1, 2, ⋯ , m} is a piecewise constant switching signal, ∀j ∈ M,∀i ∈ {1,2, ⋯ ,n}, f j,i (•) are C 1 functions with f j,i (0) = 0, g j,i (•) are r-vector-valued smooth functions with g j,i (0) = 0, and ω is an independent r-dimensional standard Wiener process.
Remark 1. The switched stochastic nonlinear system (1) has the typical structure called strict-feedback form, which has been widely studied recently, such as [29] for the Markovian switching case, [27] for the non-stochastic and non-switched case, etc. Compared to [22], the class of systems we studied is a more general nonlinear system even in the non-switched case.
The goal of this paper is to design a controller for system (1) by backstepping approach such that the zero solution of the closed-loop system is globally asymptotically stable in probability under arbitrary switchings. Further, it will be proved that the zero equilibrium of the closed-loop system is of pth-moment globally exponential stability, i.e., there exist k > 0, c > 0, p > 0 such that \(\operatorname{E} \left[ {\left\| {x(t)} \right\|_p^p} \right] \leqslant k\left\| {x(0)} \right\|_p^p{\operatorname{e} ^{ - ct}},\forall \left\| {x(0)} \right\| \in {{\mathbf{R}}^n}.\)
3 Main results
3.1 Controller design
Since states x 2 , ⋯ , x n are not measured, the observer is designed as
where k i > 0 are the design parameters. Define the estimate error as
where

and

Here, the design parameters k i > 0 are chosen such that A is a Hurwitz matrix. Now, the entire system can be described by

Define the following coordinate transformation
where α i –1 (•) are the virtual stabilizing functions to be determined later and \[{\bar \hat x_i} = {\left[ {{{\hat x}_1},{{\hat x}_2}, \cdots ,{{\hat x}_i}} \right]^\operatorname{T} }\]. Then according to \(\operatorname{It} \hat o'\operatorname{s} \) differentiation rule, system (5) can be transformed into the following equalities

Naturally, the goal is changed to design a controller for system (7) by backstepping approach such that the equilibrium at the origin of the closed-loop system is globally asymptotically stable in probability under arbitrary switchings. Similar to [22], instead of constructing the stabilizing functions α i and u in a step-by-step fashion, we derive them simultaneously. In this paper, the stabilizing functions α i and u are constructed as
where si (•) to be determined later are all smooth functions defined on R i .
3.2 Stability analysis
Theorem 1. For system(8), there exists a control law taking the form of (7) such that the equilibrium at the origin of the closed-loop system is fourth-moment exponentially stable.
Proof. Since ∀j ∈ M, f j,i (y) and g j,i (y) are smooth functions with f j,i (0) = 0 and g j,i (0) = 0, by the mean value theorem, f j,i (y) and g j,i (y) can be expressed as
where φ j,i (y) and ψ j,i (y) are both smooth functions.
Because of the term \(\frac{1}{2}\) tr  caused by stochastic case, we employ quartic Lyapunov functions. Define a Lyapunov function of the form
caused by stochastic case, we employ quartic Lyapunov functions. Define a Lyapunov function of the form

where P is a positive defined matrix which satisfies A T P + PA = – I. Then according to the \(\operatorname{It} \hat o'\operatorname{s} \) differentiation rule, we have

where

Next, the terms  tr
tr  and \(z_i^3{k_i}{\tilde x_1}\) are further handled one by one such that their effects on the negativity of LV can be canceled by s
i
selected properly. To handle these terms, a special case of the well-known Young’s inequality[25] plays a very important role, which states that the inequality
and \(z_i^3{k_i}{\tilde x_1}\) are further handled one by one such that their effects on the negativity of LV can be canceled by s
i
selected properly. To handle these terms, a special case of the well-known Young’s inequality[25] plays a very important role, which states that the inequality
holds for any constants p > 1 and q > 1 satisfying (p−1 )(q–1) = 1.
By simple calculation and using Young’s inequality, one has



and
Based on the above analysis, we have
where ∀j ∈ M,




and the following equality is used.
In (27), ε, δ, η, θ, κ and ξ are positive constants to be chosen. λ > 0 is the smallest eigenvalue of P. We will choose ∈1 , ∈2 , ∈3 ,θ i , κi and η i to satisfy
Obviously, it is a simple task to select s i , ∀ i ∈ {1,2, ⋯ ,n} such that
where c i > 0. Then we get
where \(c = \min \left\{ {4{c_i},\frac{{2p}}{{\lambda _{\max }^2}}} \right\},\) i = 1,2, ⋯ ,n, λ max > 0 is the maximal eigenvalue of P.
Observe that

For a given time t, suppose that switchings occur at the time instants t 1 , ⋯ ,t K , thus the time interval can be divided as [0,t 1 ) ∪ ⋯ ∪ [t K –1 , t K ) ∪ [t K , t]. Integrating both sides of the above inequality on each subinterval and taking expectations yield
and
where k = 1, ⋯ , K − 1 and t 0 = 0. Since the system state does not jump at the switching instants and V is a common Lyapunov function for all subsystems
Then it follows from (40) and (41) that
As we stated previously, the Lyapunov function we employ satisfies

where Y = [z 1 ,z 2 , ⋯ , z n , x1 , x 2, ⋯ ,x n ]T. Hence,
4 An illustrative example
In the following, an example shown in [30] is presented to illustrate the effectiveness of our result. The continuously stirred tank reactor with two-mode feeding stream is molded as the following system
with \({f_{1,1}}({x_1}) = \frac{1}{2}{x_1}\) and f 2 ,1 (x 1 ) = 2x 1 . It is assumed that there exists white noise due to the term f σ (t),1 in the above system. As a result, we have the following stochastic nonlinear system
For this system, the estimator is
It is easy to obtain that \({\varphi _{1,1}} = \frac{1}{2}\), φ 2,1 = 2, \({\psi _{1,1}} = \frac{1}{2}\), ψ 2,1 = 2 and φ j, 2 = ψ j, 2 = 0 for j = 1, 2. Based on(30), a smooth function s 1 should be chosen such that

According to the first equation of (8), the virtual control is expressed as
Then, based on (37), a smooth function s 2 should be chosen such that
which leads to the following control law by the third equation of (8)
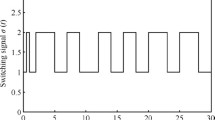
In the numerical simulation, we chose k 1 = 3, k 2 = 4.5, C1 = − 0.01, c2 = − 0.1, δ1 = 1, ξ2 = 1, T 2 = 1, ∈1 = 3, ∈2 = 0.125, ∈3 = 1,η 2 = 3, and θ2 = 3 and set the initial condition to be x 1 (0) = 0.1, x 2 (0) = 0, \({\hat x_1}(0) = 0\) and \({\hat x_2}(0) = 0\). The switching signal generated randomly is shown in Fig. 1. The trajectories of the states and the estimates are shown in Figs. 2 and 3, respectively. From Fig. 2, one can see that the outputs of the closed-loop system converges to zero asymptotically. The simulation results show the effectiveness of the proposed control method.

The switching signal generated randomly

The curves of the state one and its estimation

The curves of the state two and its estimation
5 Conclusion
This paper has investigated the problem of global stabilization of switched stochastic output feedback nonlinear systems under arbitrary switchings by backstepping approach. A common output feedback controller independent of switching signals is constructed to guarantee that the equilibrium at the origin of the closed-loop system is fourth-moment exponentially stable. And an example is employed to show the effectiveness of the proposed method.
References
Z. D. Sun, S. S. Ge. Stability Theory of Switched Dynamical Systems, Berlin, Germany: Springer-Verlag, 2011.
D. Liberzon, A. S. Morse. Basic problems in stability and design of switched systems. IEEE Control Systems Magazine, vol. 19, no. 5, pp. 59–70, 1999.
D. Liberzion. Switching in Systems and Control, Berlin, Germany: Springer-Verlag, 2003.
J. Lian, J. Zhao, G. M. Dimirovski. Integral sliding mode control for a class of uncertain switched nonlinear systems. European Journal of Control, vol. 16, no. 1, pp. 16–22, 2010.
J. Lian, Y. L. Ge. Robust H∞ output tracking control for switched systems under asynchronous switching. Nonlinear Analysis: Hybrid Systems, vol. 8, pp. 57–68, 2013.
D. Wang, P. Shi, J. L. Wang, W. Wang. Delay-dependent exponential H∞ filtering for discrete-time switched delay systems. International Journal of Robust and Nonlinear Control, vol. 22, no. 13, pp. 1522–1536, 2012.
L. Vu, D. Liberzon. Common Lyapunov functions for families of commuting nonlinear systems. Systems & Control Letters, vol. 54, no. 5, pp. 405–416, 2005.
J. L. Wu. Stabilizing controllers design for switched nonlinear systems in strict-feedback form. Automatica, vol. 45, no. 4, pp. 1092–1096, 2009.
R. C. Ma, J. Zhao. Backstepping design for global stabilization of switched nonlinear systems in lower triangular form under arbitrary switchings. Automatica, vol. 46, no. 11, pp. 1819–1823, 2010.
J. P. Hespanha, A. S. Morse. Stabilization of nonholonomic integrators via logic-based switching. Automatica, vol. 35, no. 3, pp. 385–393, 1999.
J. Zhao, D. J. Hill. On stability, L2-gain and H∞ control for switched systems. Automatica, vol. 44, no. 5, pp. 1220–1232, 2008.
Z. G. Pan, T. Basar. Adaptive controller design for tracking and disturbance attenuation in parametric strict-feedback nonlinear systems. IEEE Transactions on Automatic Control, vol. 43, no. 8, pp. 1066–1083, 1998.
Z. G. Pan, T. Basar. Backstepping controller design for nonlinear stochastic systems under a risk-sensitive cost criterion. SIAM Journal on Control and Optimization, vol. 37, no.3, pp. 957–995, 1999.
X. Yu, N. Duan. Output feedback for stochastic nonlinear systems with unmeasurable inverse dynamics. International Journal of Automation and Computing, vol.6, no. 4, pp. 391–394, 2009.
H. Deng, M. Krstić. Stochastic nonlinear stabilization - I: A backstepping design. Systems & Control Letters, vol. 32, no.3, pp. 143–150, 1997.
H. Deng, M. Krstić. Output-feedback stabilization of stochastic nonlinear systems driven by noise of unknown co-variance. Systems & Control Letters, vol. 39, no. 3, pp. 173–182, 2000.
Z. D. Wang, H. Qiao, K. J. Burnham. On stabilization of bilinear uncertain time-delay stochastic systems with Marko-vian jumping parameters. IEEE Transactions on Automatic Control, vol. 47, no. 4, pp. 640–646, 2002.
W. Feng, J. F. Zhang. Stability analysis and stabilization control of multivariable switched stochastic systems. Auto-matica, vol. 42, no. 1, pp. 169–176, 2006.
J. Liu, X. Z. Liu, W. C. Xie. Exponential stability of switched stochastic delay systems with non-linear uncertainties. International Journal of Systems Science, vol. 40, no.6, pp. 637–648, 2009.
W. Feng, J. Tian, P. Zhao. Stability analysis of switched stochastic systems. Automatica, vol. 47, no. 1, pp. 148–157, 2011.
N. H. El-Farra, P. Mhaskar, P. D. Christofides. Output feedback control of switched nonlinear systems using multiple Lyapunov functions. Systems & Control Letters, vol. 54, no. 12, pp. 1163–1182, 2005.
H. Deng, M. Krstić. Output-feedback stochastic nonlinear stabilization. IEEE Transactions on Automatic Control, vol. 44, no. 2, pp. 328–333, 1999.
Z. J. Wu, J. Yang, P. Shi. Adaptive tracking for stochastic nonlinear systems with Markovian switching. IEEE Transactions on Automatic Control, vol. 55, no. 9, pp. 2135–2141, 2010.
P. Krishnamurthy, F. Khorrami, R. S. Chandra. Global high-gain-based observer and backstepping controller for generalized output-feedback canonical form. IEEE Transactions on Automatic Control, vol. 48, no. 12, pp. 2277–2283, 2003.
P. Kokotović, M. Arcak. Constructive nonlinear control: a historical perspective. Automatica, vol. 37, no. 5, pp. 637–662, 2001.
M. Krstic, I. Kanellakopoulos, P. V. Kokotovid. Nonlinear and Adaptive Control Design, New York, USA: John Wiley, 1995.
J. Zhou, C. Y. Wen. Adaptive Backstepping Control of Uncertain Systems: Nonsmooth Nonlinearities, Interactions or Time-variations, Berlin, Germany: Springer-Verlag, 2008.
C. L. Liu, S. C. Tong, Y. M. Li, Y. Q. Xia. Adaptive fuzzy backstepping output feedback control of nonlinear time-delay systems with unknown high-frequency gain sign. International Journal of Automation and Computing, vol.8, no. 1, pp. 14–22, 2011.
Z. J. Wu, X. J. Xie, P. Shi, Y. Q. Xia. Backstepping controller design for a class of stochastic nonlinear systems with Markovian switching. Automatica, vol. 45, no. 4, pp. 997–1004, 2009.
R. C. Ma, J. Zhao. Backstepping design for global stabilization of switched nonlinear systems in lower triangular form under arbitrary switchings. Automatica, vol. 46, no. 11, pp. 1819–1823, 2010.
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by National Basic Research Program of China (973 Program) (No. 2012CB821205), National Natural Science Foundation of China (Nos.61021002 and 61203125), and Fundamental Research Funds for the Central Universities (No. HIT. NSRIF. 2013039).
Xiao-Ling Liang received her M. Sc. degree from Information Science and Technology College, Dalian Maritime University, China in 2010. Now, she is a Ph. D. candidate in the Center for Control Theory and Guidance Technology at Harbin Institute of Technology, China.
Her research interests include robust control and integrated guidance and control for aircraft.
Ming-Zhe Hou received his B. Eng. degree in automation and Ph. D. degree in navigation, guidance and control from Harbin Institute of Technology, China in 2005 and in 2011, respectively. Currently, he is a lecturer at School of Astronautics, Harbin Institute of Technology.
His research interests include nonlinear control and guidance and control of aircraft.
Guang-Ren Duan received his Ph.D. degree in control systems theory from Harbin Institute of Technology, China in 1989. From 1989 to 1991, he was a postdoctoral researcher at Harbin Institute of Technology, where he became a professor of control systems theory in 1991. He visited the University of Hull, UK, and the University of Sheffield, UK from December 1996 to October 1998, and worked at the Queen’s University of Belfast, UK from October 1998 to October 2002. Since August 2000, he has been elected Specially Employed Professor at Harbin Institute of Technology sponsored by the Cheung Kong Scholars Program of the Chinese government. He is currently the director of the Center for Control Systems and Guidance Technology at Harbin Institute of Technology. He is a chartered engineer in UK, a senior member of IEEE and a Fellow of IEE.
His research interests include robust control, eigenstructure assignment, descriptor systems, missile autopilot design and magnetic bearing control.
Rights and permissions
About this article

Cite this article
Liang, XL., Hou, MZ. & Duan, GR. Output Feedback Stabilization of Switched Stochastic Nonlinear Systems Under Arbitrary Switchings. Int. J. Autom. Comput. 10, 571–577 (2013). https://doi.org/10.1007/s11633-013-0755-4
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11633-013-0755-4