
Abstract
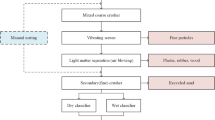
The recycling of construction and demolition waste (CDW) remains an urgent problem to be solved. In the industry, raw CDW needs to be manually sorted. To achieve high efficiency and avoid the risks of manual sorting, a sorting robot can be designed to grasp and sort CDW on a conveyor belt. But dynamic grasping on the conveyor belt is a challenge. We collected location information with a three-dimensional camera and then evaluated the method of dynamic robotic grasping. This paper discusses the grasping strategy of rough processed CDW on the conveyor belt, and implements the function of grasping and sorting on the recycling line. Furthermore, two new mathematical models for a robotic locating system are established, the accuracy of the model is tested with Matlab, and the selected model is applied to actual working conditions to verify the sorting accuracy. Finally, the robot kinematics parameters are optimized to improve the sorting efficiency through experiments in a real system, and it was concluded that when the conveyor speed was kept at around 0.25 m·s−1, better sorting results could be achieved. Increasing the speed and shortening the acceleration/deceleration time would reach the maximum efficiency when the load would allow it. Currently, the sorting efficiency reached approximately 2000 pieces per hour, showing a high accuracy.
Similar content being viewed by others

References
J. L. Gálvez-Martos, D. Styles, H. Schoenberger, B. Zeschmar-Lahl. Construction and demolition waste best maeagomoet practice in Europe. Resources, Conservation and Recycling, vol. 136, pp. 166–178, 2018. DOI: https://doi.org/10.1016/j.resconrec.2018.04.016.
Eurostat. Generation of Waste by Waste Category. 2020 [Online], Available: https://ec.europa.ou/eurostat, June 4, 2020.
China Strategic Alliance of Technological Innovation for Construction Waste Recycling Industry in Chinese. Industrialization Development Report of China’s Construction Waste Resource, 2017. [Online], Available: http://www.fqwzyhlm.org, June 4, 2020.
W. L. Huaeg, D. H. Lin, N. B. Chang, K. S. Lin. Recycling of construction and demolition waste via a mechanical sorting process. Resources, Conservation and Recycling, vol. 37, no. 1, pp. 23–37, 2002. DOI: https://doi.org/10.1016/S0921-3449(02)00053-8.
A. Picón, O. Ghita, A. Bereciartua, J. Echazarra, P. F. Whelan, P. M. Iriondo. Real-time hyperspectrial processing for automatic nonferrous material sorting. Journal of Electronic Imaging, vol. 21, no. 1, Article number 013018, 2012. DOI: https://doi.org/10.1117/1.JEI.21.1.013018.
S. Serranti, A. Gargiulo, G. Bonifazi. Classification of polyolefins from building and construction waste using NIR hyperspectral imaging system. Resources, Consevation and Recycling, vol. 61, pp. 52–58, 2012. DOI: https://doi.org/10.1016/j.resconrec.2012.01.007.
S. M. Safavi, H. Masoumi, S. S. Mirian, M. Tabrizchi. Sorting of polypropylene resins by color in MSW using visible reflectance spectroscopy. Waste Management, vol. 30, no. 11, pp. 2216–2222, 2010. DOI: https://doi.org/10.1016/j.wasman.2010.06.023.
S. Serranti, G. Bonifazi, R. Pohl. Spectral cullet classification in the mid-infrared field for ceramic glass contaminants detection. Waste Management & Research, vol. 24, no. 1, pp. 48–50, 2006. DOI: https://doi.org/10.1177/0734242X06061017.
C. Ma, H. Qiao, R. Li, X. Q. Li. Flexible robotic grasping strategy with constrained region in environment. International Journal of Automaton and Computing, vol. 14, no. 5, pp. 552–563, 2017. DOI: https://doi.org/10.1007/s11633-017-1096-5.
T. Boraegiu, F. D. Anton, A. Dogar. Visual robot guidance in conveyor tracking with belt variables. In Proceedings of IEEE International Conference on Automation, Quality and Testing, Robotics, IEEE Cluj-Napoca, Romania, pp. 1–6, 2010. DOI: https://doi.org/10.1109/AQTR.2010.5520880.
A. Cowley, B. Cohen, W. Marchall, C. J. Taylor, M. Likhachev. Perception and motion planning for plck-and-place of dyeamic objects. In Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, IEEE, Tokyo, Japan, 2013. DOI: https://doi.org/10.1109/IROS.2013.6696445.
H. X. Ma, W. Zou, Z. Zhu, C. Zhang, Z. B. Kang. Selection of observation position and orientation in visual servoing with eye-in-vehicle configuration for manipulator International Journal of Automaton and Computing, vol. 16, no. 6, pp. 761–774, 2010. DOI: https://doi.org/10.1007/s11633-019-1181-z.
I. Konukseven, B. Kaftaeoglu, T. Balkae. Multisensor controlled robotic tracking and automatic pick and place. In Proceedings of IEEE/RSJ Intrenational Conference on Intelligent Robot and Systems. Innovative Robotics for Real-World Applications, IEEE, Grenoble, France, pp. 1356–1362, 1997. DOI: https://doi.org/10.1109/IROS.1997.656515.
T. Y. Fu, F. M. Li, Y. K. Zheng, W. Quan, R. Song, Y. B. Li. Dynamically grasping with incomplete iforamation workpiece based on machine vision. In Proceedings of IEEE International Conference on Unmanned Systems, IEEE, Beijeng, China, pp. 502–507, 2019. DOI: https://doi.org/10.1109/ICUS48101.2019.8996076.
Q. Wan, R. D. Howe. Modeling the effects of contact sensor resolution on grasp success. IEEE Robotics and Automation Letters, vol. 3, no. 3, pp. 1033–1040, 2018. DOI: https://doi.org/10.1109/LRA.2018.2807581.
D. Kaserer, H. Gattringer, A. Müller. Time optimal motion planning and admittance control for cooperative grasping. IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2216–2223, 2020. DOI: https://doi.org/10.1109/LRA.2020.2070644.
M. Jokesch, M. Bdiwi, J. Suchý. Integration of vision/force robot control for transporting different shaped/colored objects from movmg circular conveyor. In Proceedings of IEEE International Symposium on Robotic and Sensors Eevironments, IEEE, Timisoara, Romania, pp. 78–82, 2014. DOI: https://doi.org/10.1109/ROSE.2014.6952987.
F. Husain, A. Colomé, B. Dellen, G. Aleeyà, C. Torras. Realtime tracking and grasping of a moving object from range video. In Proceedings of IEEE International Conference on Robotics and Automation, IEEE, Hong Kong, China, pp.2617–2622, 2014. DOI: https://doi.org/10.1109/ICRA.2014.6907234.
D. Stogl, D. Zumkeller, S. E. Navarro, A. Heilig, B. Hein. Teacking, reconstruction and grasping of unknown rotationally symmetrical objects from a conveyor belt. In Proceedings of the 22nd IEEE International Conference on Emerging Technologies and Factory Automation, IEEE, Limassol, Cyprus, pp. 1–8, 2017. DOI: https://doi.org/10.1109/ETFA.2017.8247651.
H. Q. Zhang, H. R. Fang, B. S. Jiang, S. G. Wang. Dynamic performance evaluation of a redundantly actuated and over-constrained parallel manipulator. International Journal of Automation and Computing, vol. 16, no. 3, pp. 274–285, 2019. DOI: https://doi.org/10.1007/s11633-018-1147-6.
Acknowledgments
The authors are thankful for the financial support provided by the Science and Technology Project of Quanzhou (Nos. 2018C100R and 2019G003), the Science and Technology Cooperation Program of Quanzhou (No. 2018C001), the Science and Technology Cooperation Program of Fujian (No. 201811006), the Joint Innovation Project of Industrial Technology in the Fujian Province, and Subsidized Project for Postgraduates’ Innovative Fund in Scientific Research of Huaqiao University.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Associate Editor Qing-Long Han
Yue-Dong Ku received the B. Eng. degree in vehicle engineering from Huaqiao University, China in 2018. Currently, he is a M. Eng. degree candidate in mechanical engineering from Huaqiao University, China.
His research interests include robot manipulation, automation control, and computer vision.
Jian-Hong Yang received the M. Eng. degree in mechanical engineering from Huaqiao University, China in 2004, and the Ph. D. degree in mechanical engineering from Huaqiao University, China in 2010. Currently, he is a professor in College of Mechanical Engineering and Automation at Huaqiao University, China, and a technical adviser in Fujian South Highway Machinery Co., Ltd, China.
His research interests include robotics, precision measurement and control technology, and modern sensing technology and fault diagnosis.
Huai-Ying Fang received the M. Eng. degree in mechanical manufacturing and automation from Anhui University of Science and Technology, China in 2003, and the Ph. D. degree in mechanical engineering from Huaqiao University, China in 2012. Currently, she is a professor in College of Mechanical Engineering and Automation at Huaqiao University, China.
Her research interests include efficient crushing of brittle materials, modeling and simulation of multiphase flow coupling, and computer dynamic simulation technology.
Wen Xiao received the B. Eng. degree in mechanical manufacturing and automation from Huaqiao University, China in 2018. Currently, he is a M. Eng. degree candidate in mechanical engineering from Huaqiao University, China.
His research interests include machine learning, pattern recognition, and hyper-spectral image technology.
Jiang-Teng Zhuang received the B. Eng. degree in mechanical manufacturing and automation from Huaqiao University, China in 2018. Currently, he is a M. Eng. degree candidate in mechanical engineering from Huaqiao University, China.
His research interests include computer vision, image processing technology, and 3D stereo imaging technology.
Rights and permissions
About this article

Cite this article
Ku, YD., Yang, JH., Fang, HY. et al. Optimization of Grasping Efficiency of a Robot Used for Sorting Construction and Demolition Waste. Int. J. Autom. Comput. 17, 691–700 (2020). https://doi.org/10.1007/s11633-020-1237-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11633-020-1237-0