
Abstract
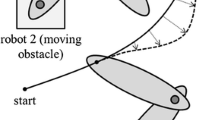
In flexible und complex handling systems trajectory planning becomes increasingly demanding. As an example, the geometry of the work pieces tends to vary more than it used to. Therefore, the planned trajectory of the handling robot has to either be adjusted for each piece individually or the trajectory has to allow general geometry. This leads to performance loss for smaller work pieces since they are less sensitive to obstacles and can therefore be moved on shorter (faster) trajectories. In both cases, time and costs could be reduced. Another characteristic of handling systems is that several handling robots share the same workspace. Again the positions of these obstacles are only known at runtime. This places great demands on the planning tools. In this paper, it is shown that both problems can be treated with a hybrid method called curve flow method. This method combines a gradient flow which comes from a variational principle and a potential field method. The variational principle makes the planned trajectories short, the potential field prevents collision.





Similar content being viewed by others

References
Groh K, Röck S (2010) A contribution to collision-free trajectory planning for handling systems in varying environments. J Prod Eng Res Dev 4(1):101–106
Kavraki LE, LaValle SM (2008) Motion planing. In: Siciliano B, Khatib O (eds) Springer handbook of robotics. Springer, Berlin
Minguez J, Lamiraux F, Laumond J-P (2008) Motion planning and obstacle avoidance. In: Siciliano B, Khatib O (eds) Springer handbook of robotics. Springer, Berlin
LaValle SM (2006) Planning algorithms. Cambridge
Eschenburg J-H, Jost J (2007) Differentialgeometrie und Minimalflächen, vol 2. Springer, Auflage
Chou KS, Zhu X-P (2001) The curve shortening problem. CRC
Deckelnick K, Dziuk G, Elliot CM (2005) Computation of geometric partial differential equations and mean curvature flows. Acta Numer, 139–232
Vesely F (2011) http://homepage.univie.ac.at/franz.vesely/notes/hard_sticks/hst/hst.html. Last time checked: 28 Nov 2011
Allen MP, Evans GT, Frenkel D, Mulder BM (1993) Hard convex body fluids. In Prigogine I, Rice SA (eds) Advances in chemical physics, vol 86. pp 1–166
Acknowledgments
The authors would like to thank the German Research Foundation (DFG) for financial support of the project within the Graduate School of advanced Manufacturing and Engineering (GSaME) at the University of Stuttgart. Furthermore, we would like to thank the reviewers for their comments.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Groh, K., Verl, A. A contribution to collision free trajectory planning for 6r robots in varying environments. Prod. Eng. Res. Devel. 6, 297–302 (2012). https://doi.org/10.1007/s11740-012-0378-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11740-012-0378-6