
Abstract
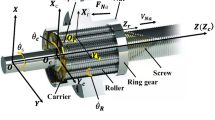
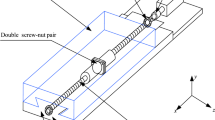
For many applications with high demands on axial forces and rigidity roller screws are being increasingly relied on. Lead and dynamic behavior are two of the key criteria concerning the design and use of roller screws. The lead results from the interaction of the threaded profile and the kinematics of each element of the roller screw. While their kinematics has been studied in recent literature, a compact equation for calculating the lead of arbitrary roller screws is still missing. Furthermore, their characteristic frequencies, as they offer a tool for the purpose of condition monitoring within the scope of a vibration analysis, are still unknown. In the following work the derivation of calculation methods for the lead of roller screws with arbitrary geometries is presented. Applying these methods, the lead of common roller screw types is calculated. In addition to the calculation of the lead, the methods allow an analysis of kinematic properties. For the purpose of condition monitoring, the characteristic frequencies of roller screws are analyzed. Exemplarily, a typical envelope spectrum of an acceleration signal that has been acquired in radial direction on a roller screw nut in good condition is presented.



Similar content being viewed by others

References
Velinsky SA, Chu B, Lasky TA (2009) Kinematics and efficiency analysis of the planetary roller screw. J Mech Des 131(1):8
Hojjat Y, Mahdi Agheli M (2009) A comprehensive study on capabilities and limitations of roller—screw with emphasis on slip tendency. Mech Mach Theory 44(10):1887–1899
Ma S et al (2015) Kinematics of planetary roller screw mechanism considering helical directions of screw and roller threads. Math Probl Eng 2015:1–11
Jones MH, Velinsky SA (2013) Stiffness of the roller screw mechanism by the direct method. Mech Based Design Struct Mach 42(1):17–34
Ryś J, Lisowski F (2014) The computational model of the load distribution between elements in a planetary roller screw. J Theor Appl Mech 52(3):699–705
Zhang W et al (2016) Load distribution of planetary roller screw mechanism and its improvement approach. Proc Inst Mech Eng Part C J Mech Eng Sci 230(18):3304–3318
Abevi F et al (2016) Static load distribution and axial stiffness in a planetary roller screw mechanism. J Mech Des 138(1):11
Jones MH, Velinsky SA (2013) Contact kinematics in the roller screw mechanism. J Mech Des 135(5):10
Jones MH, Velinsky SA (2012) Kinematics of roller migration in the planetary roller screw mechanism. J Mech Des 134(6):6
Jones MH, Velinsky SA, Lasky TA (2016) Dynamics of the planetary roller screw mechanism. J Mech Robot 8(1):6
Kozyrev VV (1983) Comparison between the Parameters of Balls an Rollers in Screw and Nut Transmissions. Sov Eng Res 3(11):25–28
Strandgren CB (1965) Roller Screw. United States Patent 3,182,522, Patented May 11, 1965
Butterfass J et al (1998) Multisensory articulated hand. Part I: hard- and software architecture. Proceedings of the 1998 IEEE International Conference on Robotics and Automation, Leuven, Belgium, 2081–2086
Roantree WJ (1968) Differential roller nut. United States Patent 3,406,584, Patented Oct. 22, 1968
Willis R (1870) Principles of mechanism. London, Longmans, Green and Co., 1870, 319–327
Harris TA, Kotzalas MN (2007) Essential Concepts of Bearing Technology, 5. edn. CRC Press, Boca Raton
Li B, Chow M-Y, Tipsuwan Y, Hung JC (2000) Neural-network-based motor rolling bearing fault diagnosis. IEEE Trans Indus Electron 47(5):1060–1069
Villwock S (2007) Identifikationsmethoden für die automatisierte Inbetriebnahme und Zustandsüberwachung elektrischer Antriebe. Dissertation. University of Siegen
Brecher C, Witt S, Klein W (2008) Condition monitoring of monorail guidance systems. Prod Eng 2(3):333–337
Lee WG et al (2015) Failure diagnosis system for a ball-screw by using vibration signals. Shock Vib. 2015:9
Acknowledgements
The authors would like to thank the European Commission for funding parts of this work as part of the project EASE-R³ within the 7th Framework Program of the European Union, as well as the German research foundation DFG for funding parts of this work within the project “Examination of the operating behavior of planetary roller screws with a varying number of threads of the screw and nut” (BR 2905/54-1).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Brecher, C., Hildebrand, M. & Krella, C. Speeds, lead and characteristic defect frequencies of arbitrary roller screws. Prod. Eng. Res. Devel. 11, 357–364 (2017). https://doi.org/10.1007/s11740-017-0714-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11740-017-0714-y