
Abstract
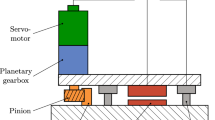
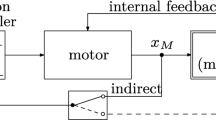
The mechanical stiffness of rack-and-pinion drives is independent from the current positioning, which yields the advantage that even long travel distances can be realized without sacrificing dynamics. A substancial disadvantage of this kind of drive, however, is the influence of nonlinear friction effects and the occurance of backlash. Proven methods minimizing the effects of these disturbances are mechanically or electrically pre-loaded powertrains, which, by requiring mutiple drive components and causing higher wear, are cost-intesive. Within this work, the possibility of a control-based strategy to compensate friction effects, which mutually interact with backlash, is investigated. The aim is the usage of MEMS-accelerometers in order to provide a cost-effective alternative to exisiting compensation measures. Central requirements are the enhancement of positioning accuracy as well as industrial applicability. The results of this work provide a strategy, which, by measuring the current acceleration of the drive and utilizing a simplified rack-and-pinion model, counteracts the negative influence of friction and backlash effectively. As part of a theoretical analysis, stability and robustness of the presented strategy are proven. Furthermore, the results found are validated experimentally by the realization of the compensation scheme on a rack-and-pinion test rig.













Similar content being viewed by others

References
Altintas Y, Verl A, Brecher C, Uriarte L, Pritschow G (2011) Machine tool feed drives. CIRP Ann Manuf Technol 60(2):779–796
Chen WH, Ballance DJ, Gawthrop PJ, O’Reilly J (2000) A nonlinear disturbance observer for robotic manipulators. IEEE Trans Ind Electron 47(4):932–938. https://doi.org/10.1109/41.857974
Engelberth T, Apprich S, Friedrich J, Coupek D, Lechler A (2015) Properties of electrically preloaded rack-and-pinion drives. Prod Eng 9(2):269–276. https://doi.org/10.1007/s11740-015-0601-3
Ishikawa J, Tomizuka M (1998) Pivot friction compensation using an accelerometer and a disturbance observer for hard disk drives. IEEE/ASME Trans Mechatron 3(3):194–201. https://doi.org/10.1109/3516.712115
Iwasaki M, Shibata T, Matsui N (1999) Disturbance-observer-based nonlinear friction compensation in table drive system. IEEE/ASME Trans Mechatron 4(1):3–8. https://doi.org/10.1109/3516.752078
Lunze J (2014) Regelungstechnik 1, 10. edn. Springer-Lehrbuch. Springer Berlin Heidelberg. https://doi.org/10.1007/978-3-642-53909-1
Olsson H, Åstom KJ, de Wit CC, Gafvert M, Lischinsky P (1998) Friction models and friction compensation. Eur J Control 4(3):176–195. https://doi.org/10.1016/S0947-3580(98)70113-X
Popovic MR, Gorinevsky DM, Goldenberg AA (2000) High-precision positioning of a mechanism with nonlinear friction using a fuzzy logic pulse controller. IEEE Trans Control Syst Technol 8(1):151–158
Suraneni S, Kar IN, Ramana Murthy OV, Bhatt R (2005) Adaptive stick-slip friction and backlash compensation using dynamic fuzzy logic system. Appl Soft Comput 6(1):26–37. https://doi.org/10.1016/j.asoc.2004.10.005
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Karim, A., Lindner, P. & Verl, A. Control-based compensation of friction and backlash within rack-and-pinion drives. Prod. Eng. Res. Devel. 12, 589–596 (2018). https://doi.org/10.1007/s11740-018-0838-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11740-018-0838-8