
Summary
The basic rhythmicity underlying animal locomotion is created by dedicated neural structures called central pattern generators (CPGs). We describe the implementation of such structures in simulation and their successful use for the control of bipedal walking. Artificial evolution (in the form of genetic algorithms) is used as the optimisation procedure.
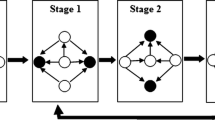
Two CPG types are illustrated, the more advanced of which being based on recent theoretical findings on the nature of neural architectures required to drive animal locomotion.
It is shown that CPGs in conjunction with simple reflex responses as well as an appropriate mechanical implementation of the biped are capable of producing stable walking patterns on planar surfaces. This finding corroborates circumstantial experimental evidence that limited bipedal locomotion is possible without the employment of higher level control centres.
Similar content being viewed by others


References
Bussel, B.; Roby-Brami, A.; Remi Neris, I.; Yakovleff, A. (1996) Evidence for a spinal stepping generator in man. Paraplegia 34: 91–92.
Cheng, J.; Stein, R. B.; Jovanovic, K.; Yoshida, K.; Bennett, D. J.; Han, Y. (1998) Identification, localization, and modulation of neural networks for walking in the mudpuppy (Necturus maculates) spinal cord. Journal of Neurosciences 18: 4295–4304.
Dietz, V. (1996) Interaction between Central Programs and Afferent Input in the Control of Posture and Locomotion. Journal of Biomechanics 29 (7): 841–844.
Duysens, F.; Clarac, F.; Cruse, H. (2000) Load-regulating mechanisms in Gain and Posture: Comparative Aspects. Physiological Reviews 80 (1): 83–133.
Getting, P.; Dekin, M. (1985) Tritonia Swimming. A model system for integration within rhythmic motor systems. In: Selverston, A. I. (ed) Model Neural Networks and Behaviour, pp. 3–19.
Golubitsky, M.; Stewart, I.; Buono, P.-L.; Collins, J. J. (1999) Symmetry in locomotor central pattern generators and animal gaits. Nature 401: 693–695.
Grillner, S.; Wallen, P.; Viana di Prisco, G. (1990) Cellular network underlying locomotion as revealed in a lower vertebrate model: Transmitters, membrane properties, circuitry, and simulation. Cold Spring Harbour Symp. Quant. Biol. 55: 779–789.
Holland, J. H. (1975) Adaption in Natural and Artificial Systems. The University of Michigan Press.
Hopfield, J. (1984) Neurones with graded response properties have collective computational properties like those of two-state neurons. Proceedings of the National Academy of Sciences 81: 3088–3092.
Ijspeert, A. (2001) A connectionsist central pattern generator for the aquatic and terrestrial gaits of a simulated salamander. Biological Cybernetics 84 (5): 331–348.
Liddell, E. G. T.; Sherrington, C. (1924) Reflexes in response to stretch (myotatic reflexes). Proceedings of the Royal Society, London [Biol.] 96: 212–242.
Mitchell, M. (1996) An Introduction to Genetic Algorithms. MIT Press, Cambridge, Massachusetts.
Paul, D. H.; Mulloney, B. (1986) Intersegmental coordination of swimmeret rhythms in isolated nerve cords of crayfish. Journal of Comparative Physiology [A] 158: 245–224.
Reil, T. (1999) Artificial Evolution of Neural Controllers in a Real-time Physics Environment. Master Thesis, University of Sussex, UK.
Reil, T.; Massey, C. (2001) Facilitating Controller Evolution in Morpho-functional Machines — A Bipedal Case Study. To appear in Hara, F.; Pfeifer, R.; Kakazu, Y. (eds) Shaping embodied intelligence — the morpho-functional machine perspectives. Berlin. Springer Verlag.
Reil, T.; Husbands, P. (2001) Evolution of Central Pattern Generators for Bipedal Walking in a Real-time Physics Environment. Submitted.
Roberts, A.; Soffe, S. R.; Perrins, R. (1997) Spinal networks controlling swimming in hatchling Xenopus tadpoles. In: Stein, P. S. G.; Grillner, S.; Selverston, A. I.; Stuart, D. G. (eds) Neurons, Networks, and Motor Behavior. Cambridge, Massachusetts. MIT Press, pp. 83–89.
Robertson, R. M.; Pearson, K. G. (1985) Neural Networks Controlling Locomotion in Locusts. Plenum Press.
Selverston, A. I. (1988) The lobster gastric mill oscillator. In: Jacklet, J. (ed) Neuronal and Cellular Oscillators. New York: Marcel Dekker, pp. 339–370.
Taga, G. (1995) A Model of the Neuro-musculo-skeletal System for Human Locomotion II. Real Time Adaptability under various constraints. Biological Cybernetics 73: 113–121.
Taylor, T.; Massey, C. (2001) Recent Developments in the Evolution of Morphologies and Controllers for Physically Simulated Creatures. Artificial Life 7: 77–87.
Wallen, P.; Ekeberg, Ö.; Lansner, A.; Brodin, L.; Traven, H.; Grillner, S. (1992) A computer-based model for realistic simulations of neural networks ii: The segmental network generating locomotor rhytmicity in the lamprey. Journal of Neurophysiology 68: 1939–1950.
Zehr, E. P.; Stein, R. B. (1999) What Functions Do Reflexes Serve During Locomotion? Progress in Neurobiology 58: 185–205.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Reil, T., Massey, C. Biologically inspired control of physically simulated bipeds. Theory Biosci. 120, 327–339 (2001). https://doi.org/10.1007/s12064-001-0026-8
Issue Date:
DOI: https://doi.org/10.1007/s12064-001-0026-8