
Abstract
This paper introduces a threshold policy with hysteresis (TPH) for the control of one-predator one-prey models. The models studied are the Lotka–Volterra and Rosenzweig–MacArthur two species density-dependent predator–prey models and the Arditi–Ginzburg nondimensional ratio-dependent model. The proposed policy (TPH) changes the dynamics of the system in such a way that a bounded oscillation is achieved confined to a region that does not allow extinction of either species. The policy can be designed by a suitable choice of so called virtual equilibrium points in a simple and intuitive manner.








Similar content being viewed by others

Notes
It is known as a proportional control in the control literature.
References
Akçakaya HR, Arditi R, Ginzburg LR (1995) Ratio-dependent prediction: an abstraction that works. Ecology 76:995–1004
Andronov AA, Vitt AA, Khaikin SE (1966) The theory of oscillators. Pergamon Press, UK
Arditi R, Ginzburg LR (1989) Coupling in predator–prey dynamics: ratio-dependence. J Theor Biol 139:311–326
Arditi R, Ginzburg LR, Akçakaya HR (1991) Variation in plankton densities among lakes: a case for ratio–dependent models. Am Nat 138:1287–1296
Berezovskaya F, Karev G, Arditi R (2001) Parametric analysis of the ratio-dependent predator–prey model. J Math Biol 43(3):221–246
Boukal DS, Křivan V (1999) Lyapunov functions for Lotka–Volterra predator–prey models with optimal foraging behavior. J Math Biol 39(6):493–517
Brauer F, Soudack AC (1981a) Coexistence properties of some predator–prey systems under constant rate harvesting and stocking. J Math Biol 12(1):101–114
Brauer F, Soudack AC (1981b) Constant-rate stocking of predator–prey systems. J Math Biol 11(1):1–14
Brokate M, Pokrovskii A, Rachinskii D (2006) Asymptotic stability of continuum sets of periodic solutions to systems with hysteresis. J Math Anal Appl 319:94–109
Brokate M, Pokrovskii AV (1998) Asymptotically stable oscillations in systems with hysteresis nonlinearities. J Differ Equ 150:98–123
Brokate M, Sprekels J (1996) Hysteresis and phase transitions. Springer, Berlin
Carnevale D, Nicosia S, Zaccarian L (2006) Generalized constructive model of hysteresis. IEEE Trans Magn 42(12):3809–3817
Collie JS, Spencer PD (1993) Management strategies for fish populations subject to long term environmental variability and depensatory predation. Technical report 93-02, Alaska Sea Grant College, pp 629–650
Costa MIS, Kaszkurewicz E, Bhaya A, Hsu L (2000) Achieving global convergence to an equilibrium population in predator–prey systems by the use of discontinuous harvesting policy. Ecol Modell 128:89–99
Ginzburg LR, Akçakaya HR (1992) Consequences of ratio-dependent predation for steady-state properties of ecosystems. Ecology 73(5):1536–1543
Gonçalves JM, Megretski A, Dahleh MA (2001) Global stability of relay feedback systems. IEEE Trans Automat Contr 46(4):550–562
Gurney WSC, Nisbet RM (1998) Ecological dynamics. Oxford University Press, New York
Hsu S-B, Hwang T-W, Kuang Y (2001) Global analysis of the Michaelis–Menten-type ratio-dependent predator–prey system. J Math Biol 42:489–506
Kot M (2001) Elements of mathematical ecology. Cambridge University Press, Cambridge
Krasnosel’skii MA, Pokrovskii AV (1989) Systems with hysteresis. Springer, New York
Křivan V, Vrkoč I (2007) A Lyapunov function for piecewise-independent differential equations: stability of the ideal free distribution in two patch environments. J Math Biol 54:465–488
Macki JW, Nistri P, Zecca P (1993) Mathematical models for hysteresis. SIAM Rev 35(1):94–123
May R (1973) Stability and complexity in model ecosystems. Princeton University Press, Princeton
Mayergoyz ID (1991) Mathematical model of hysteresis. Springer, Berlin
Meza MEM, Bhaya A, Kaszkurewicz E (2006) Stabilizing control of ratio–dependent predator–prey models. Nonlinear Anal Theory Methods Appl 7(4):619–633
Meza MEM, Bhaya A, Kaszkurewicz E, Costa MIS (2005) Threshold policies control for predator–prey systems using a control Liapunov function approach. Theor Popul Biol 67(4):273–284
Meza MEM, Bhaya A, Kaszkurewicz E, Costa MIS (2006) On–off policy and hysteresis on–off policy control of the herbivore-vegetation dynamics in a semi-arid grazing system. Ecol Eng 28(2):114–123
Moreno UF, Peres PLD, Bonatti IS (2003) Analysis of piecewise-linear oscillators with hysteresis. IEEE Trans Circuits Syst I Fundam Theory Appl 50(8):1120–1124
Murray JD (2002) Mathematical biology I. An introduction, 3rd edn. Springer, New York
Utkin VI (1992) Sliding modes in control and optimization. Springer, Berlin
Varigonda S, Georgiou TT (2001) Dynamics of relay relaxation oscillators. IEEE Trans Automat Contr 46(1):65–77
Visintin A (1994) Differential models of hysteresis. Springer, Berlin
Xiao D, Ruan S (2001) Global dynamics of a ratio-dependent predator–prey system. J Math Biol 43(3):267–290
Acknowledgments
This research was partially financed by Projects No. E-26/152.177/03, E-26/170.386/05 and E-26/100.455/2007 (CNE) of FAPERJ, and Project No. 154631/2006-0 of CNPq, and also by the agency CAPES.
Author information
Authors and Affiliations
Corresponding authors
Appendix
Appendix
Proof of the Theorem 1
For simplicity, consider the specific Lotka–Volterra model as follows:
For this model, we demonstrate that the region IR (A–B–C–D–A), in Fig. 9, is invariant and globally attractive.

Phase portrait diagram of the Lotka–Volterra model. The globally attracting invariant region in the phase plane is the region A−B−C−D−A. The curve labelled \(l_{G^1}^{\rm tr}\) is the trajectory that enters the region A–B–C–D–A at the point D and remains within it thenceforth, and the curve labeled \(l_{G^2}^{\rm tr}\) is the trajectory that enters the region A−B−C−D−A at the point B and remains within it thenceforth. τ = α1 x + α2 y − Sd, S 0 = S d + σ and S 1 = S d − σ. S y0 = S 0/α2, S y1 = S 1/α2, S x0 = S 0/α1 and S x1 = S 1/α1.
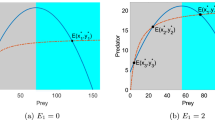
Figure 9 shows the regions G 1, G 2, G 3, \({{\mathcal{R}}}^i\) for i = 4, 5, 6, 7, the curves V ϕ=0(z) and V ϕ=1(z), the switching lines M 0 and M 1 in a case where the threshold is as in Eq. (10), and the stable equilibrium points z fs2 and z cs2 are virtual. The first condition of the TPH theorem is satisfied.
Conditions on the vector fields and Invariance of region A–B–C–D–A
The following geometrical approach is inspired by the papers Boukal and Křivan (1999), in which the basic types of solution behavior along a single discontinuity line were summarized. In order to determine the behavior of trajectories along M 0 and M 1 analytically, we take a vector η, which is as in Definition 2, and we examine the scalar products of this vector with \(f^{G^2}(z) \quad \hbox{ and } \quad f^{G^1}(z), \quad \hbox{ where } \quad f^{G^2}(z)\) is the dynamics of the free system (u 1 = u 2 = 0), and \(f^{G^1}(z)\) is the dynamics of the controlled system (u 1 = ɛ1 x, u 2 = ɛ2 y). Now, we verify direction of the vector field in switching surfaces M 0 and M 1,
We analyze the conditions on M 0: (1) \(c_1^{M_0}:=\langle\eta, f^{G^2}(z) \rangle > 0\) means that trajectories below M 0 (segment \(\overline{F S_0^x})\) are entering region G 1 (or leave region G 3); (2) \(c_2^{M_0}:=\langle\eta, f^{G^1}(z) \rangle<0\) means that trajectories above M 0 (segment \(\overline{S_0^y B})\) entering region G 3; and conditions on M 1: (1) \(c_1^{M_1}:=\langle\eta, f^{G^2}(z) \rangle >0\) means that trajectories below M 1 (segment \(\overline{D S_1^x})\) are entering region G 3 (or leave region G 2); (2) \(c_2^{M_1}:=\langle\eta, f^{G^1}(z) \rangle < 0\) means that trajectories above M 1 (segment \(\overline{S_1^y E})\) are entering region G 2 (or leave region G 3). The vector normal to M 0 and M 1 is η = [α1 α2]. Therefore, there exist two segments, \(\overline{F B} \hbox{ and }\overline{D E},\) in which the vector fields are in opposite directions.
From \(c_1^{M_1},\) we obtain the following expression
points that satisfy (14) are on the right of V ϕ=0(z), i.e., region \({{\mathcal{R}}}^4;\) and from \(c_2^{M_0},\) we obtain the following expression
points that satisfy (16) are on the left of V ϕ=1(z), i.e., region \({{\mathcal{R}}}^7.\) The points E and B are located where the curve V ϕ=1(z) intersects the switching surfaces M 0 and M 1, respectively. The points D and F are located where the curve V ϕ=0(z) intersects the switching surfaces M 0 and M 1, respectively. The intersection of curves \(l_{G^2}^{\rm tr}\) and M 1 is the point A, and the intersection of curves \(l_{G^1}^{\rm tr}\) and M 0 is the point C. Points that belong to \({{\mathcal{R}}}^4 \bigcap {{\mathcal{R}}}^7\) satisfy \(c_1^{M_1}\) and \(c_2^{M_0}\) . Therefore, the intersection of regions \({{\mathcal{R}}}^4 \bigcap {{\mathcal{R}}}^7 \bigcap G^3\) is not measure zero.
The curve labelled \(l_{G^1}^{\rm tr}\) is the trajectory that enters region IR at the point D and remains within it thenceforth, and the curve labeled \(l_{G^2}^{\rm tr}\) is the trajectory that enters region IR at the point B and remains within it thenceforth. The region that satisfies (14) and (16), i.e., \({{\mathcal{R}}}^4 \bigcap {{\mathcal{R}}}^7,\) is the subset of points which their trajectories enter region G 3 with a transversal motion, and conditions \(c_1^{M_1}\) and \(c_2^{M_0}\) means that the vector fields are oriented in opposite directions, see Figs. 9 and 10. Therefore, the region IR is invariant.

Phase portrait dynamics of the the Lotka–Volterra system with TPH. Parameter values: a = 1, b = 1, r 1 = 1, r 2 = 1, α1 = 0.2, α2 = 1, σ = 0.1, ɛ1 = 0.5, ɛ2 = 0.5 and S d = 1
Global attractivity of the region IR
Trajectories of the Lotka–Volterra system are given implicitly by the first integral. Thus the point mapping, see Fig. 11, from z 0 towards z 2 must satisfy:
and the point mapping from z 2 towards z 4 must satisfy:
Taking logarithms of the above equations and substracting (19) from (18) leads to:
The points z 0 and z 4 belong to line M 0 and they satisfy
Equation 20 can be expressed as
It is reasonable to assume that x 2 < x 0 which implies that y 2 > y 0. Under this assumption the left hand side of Eq. 21 is negative. If x 0 > x 4 then the first term of right hand side of Eq. 21 is positive and the second term is negative. It is possible to choose the α i (and, if necessary the ɛ i ) to make the third term sufficiently negative to ensure that the left hand side and the right hand side have the same negative sign, and, in addition, satisfy the slope condition (equation 7 in Costa et al. 2000). Therefore, the trajectory z 0 → z 2 → z 4 is contracting, in other words, z 4 is on the left of z 0, and the mapping \(z_0 \mapsto z_4\) is a contraction, see Fig. 11.

Phase portrait dynamics of the the Lotka–Volterra system with TPH. Parameter values: a = 1, b = 1, r 1 = 1, r 2 = 1, α1 = 0.2, α2 = 1, σ = 0.1, ɛ1 = 0.5, ɛ2 = 0.5 and S d = 1. Showing the point mapping \(z_0\,{\mapsto}\,z_2\) on the switching line under a trajectory of the system with harvesting (control), as well as the point mapping \(z_2\,\mapsto\,z_4\) under a trajectory of the system without harvesting, for the Lotka–Volterra system subject to the TPH, when both equilibrium points z fs2 and z cs2 are virtual
In Fig. 11, all trajectories that cross M 0 between points B and \(z^{\rm tr}_{G^1}\) enter region IR and remain within it thenceforth, and all trajectories that cross M 1 between points \(z^{\rm tr}_{G^2}\) and D enter region IR and remain within it thenceforth.
There exists a trajectory which maps condition \(\bar{z}_0\) into \(z_{\rm tr}^{G^1}.\) Any trajectory with initial condition on M 0 between the points \(z^{\rm tr}_{G^1}\) and \(\bar{z}_0\) or crosses line M 0 between the points \(z^{\rm tr}_{G^1}\) and \(\bar{z}_0,\) entering the region IR at first, and remains within it thenceforth, as can be observed for the mapping \(z_0 \mapsto z_4\) (see Fig. 11). For any trajectory that crosses M 0 on the right of \(\bar{z}_0,\) we can demonstrate that with a second iteration of mapping, that trajectory enters the region IR and remains within it thenceforth. To economize space, this demonstration is omitted, but it follows the idea of the contraction of trajectory shown above. Therefore, the region IR is globally attractive. □
Remark 6
The curves V ϕ=0(z) and V ϕ=1(z) are derived as in Boukal and Křivan (1999). Another way to derive the curves V ϕ=0(z) and V ϕ=1(z) is considering a Liapunov function for each switching line M 0 and M 1, such that the time derivative of each Liapunov function must be negative. The Liapunov function for switching line M 0 is \(V_{M_0}(z)=\left(\tau(z)-\sigma \right)^2/2,\) and the Liapunov function for switching line M 1 is \(V_{M_1}(z)=\left(\tau(z)+\sigma \right)^2/2,\) where τ(z) = α1 x + α2 y − S d .
Remark 7
Trajectories that belong to the same region and are distinct never intersect. Trajectories with initial condition in region G 2 enter the region G 3 and switch when they cross the line M 0 (τ = σ), and trajectories with initial condition in region G 1 enter to the region G 3 and switch when they cross the line M 1 (τ = −σ), see Fig. 10. Therefore, there is no possibility that the system slides in the line τ = 0. Any trajectory on the left or right of \(l^{\rm tr}_{G^2}\) never intersect it, because these trajectories belong to the same region.
Rights and permissions
About this article
Cite this article
Mendoza Meza, M.E., Bhaya, A. Realistic threshold policy with hysteresis to control predator–prey continuous dynamics. Theory Biosci. 128, 139–149 (2009). https://doi.org/10.1007/s12064-009-0062-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12064-009-0062-3