
Abstract
In this work, we investigate a prey-predator model which includes the Allee effect phenomena in prey growth function, density dependent death rate for predators and ratio dependent functional response. we fulfill a comprehensive bifurcation analysis, constructing the two-parametric bifurcation diagrams which describes the effect of density dependent death rate parameter, and also show possible phase portraits. We have also investigated the model in the absence of Allee effect and corresponding bifurcation diagram has been presented to show the dynamical changes in the system. Then we compare the properties of the ratio dependent prey-predator model with and without the Allee effect and show that Allee effect has a significant role in the dynamics. Allee effect can preserve local extinction of populations and suppress the stability of interior equilibrium point. Finally, all the analytical results are validated with the help of numerical simulations.









Similar content being viewed by others

References
Aguirree, P., Flores, J.D., Olivares, E.: Bifurcations and global dynamics in a predator-prey model with a strong Allee effect on the prey and a ratio-dependent functional response (2014)
Allee, W.C.: Animal Aggregations. University of Chicago Press, Chicago (1931)
Angelis, D.: Dynamics of Nutrient Cycling and Food Webs. Chapman and Hall, London (1992)
Arditi, R., Perrin, N., Saiah, H.: Functional responses and heterogeneities: an experimental test with cladocerans. Oikos 60, 69–75 (1991)
Arditi, R., Ginzbur, L.R.: Coupling in predator-prey dynamics: ratio-dependence. J. Theor. Biol. 139, 311–326 (1989)
Banerjee, M., Petrovskii, S.: Self-organised spatial patterns and chaos in a ratio-dependent predator-prey system. Theor. Ecol. 4, 37–53 (2011)
Bazykin, A.D., Khibnik, A.I., Krauskopf, B.: Nonlinear dynamics of interacting populations, Vol. 11 (World Scientific Publishing Company Incorporated) (1998)
Beddington, J.R.: Mutual interference between parasites or predators and its effect on searching efficiency. J. Animal Ecol. 44, 331–340 (1975)
Beretta, E., Kuang, Y.: Global analyses in some delayed ratio-dependent predator prey systems. Nonlinear Anal. 32, 381–408 (1998)
Berezovskaya, F., Karev, G., Arditi, R.: Parametric analysis of the ratio-dependent predator-prey model. J. Math. Biol. 43, 221–246 (2001)
Canale, R.: Predator-prey relationships in a model for the activated process. Biotechnol. Bioeng. 11, 887–907 (1969)
Conway, E.D., Smoller, J.A.: Global analysis of a system of predator-prey equations. SIAM J. Appl. Math. 46, 630–642 (1986)
Courchamp, F., Clutton-brock, T., grenfell, B.: Inverse density dependence and the Allee effect. Trends Ecol. Evol. 14, 405–410 (1999)
DeAngelis, D.L., Goldstein, R.A., O’Neill, R.V.: A model for trophic interaction. Ecology 56, 881–892 (1975)
Fan, Y.H., Li, W.T.: Permanence for a delayed discrete ratio-dependent predator-prey system with Holling type functional response. J. Math. Anal. Appl. 299(2), 357–374 (2004)
Freedman, H.: Stability analysis of a predator-prey system with mutual interference and density-dependent death rates. Bull. Math. Biol. 41, 67–78 (1979)
Freedman, H.: Deterministic Mathematical Method in Population Ecology. Dekker, New York (1990)
Gonzalez-Olivares, E., Rojas-Palma, A.: Multiple limit cycles in a gause type predator-prey model with holling type III functional response and Allee effect on prey. Bull. Math. Biol. 73, 1378–1397 (2011)
Hanski, I.: The functional response of predators: worries about scale. Trends Ecol. Evol. 6, 141–142 (1991)
Haque, M.: Ratio-dependent predator-prey models of interacting populations. Bull. Math. Biol. 71, 430–452 (2009)
Hilker, F.: Population collapse to extinction: the catastrophic combination of parasitism and Allee effect. J. Biol. Dyn. 4, 86–100 (2010)
Hilker, F., Langlais, Malchow H: The Allee effect and infectious diseases: extinction, multistability and the disappearance of oscillations. Am. Nat. 173, 72–88 (2009)
Holling, C.: The functional response of predators to prey density and its role in mimicry and population regulation. Mem. Entomol. Soc. Can. 97, 1–60 (1965)
Hsu, S., Hwang, T., Kuang, Y.: Global analysis of the michaelis-menten type ratio-dependent predator-prey system. J. Math. Biol. 42, 489–506 (2001)
Jost, C., Arino, O., Arditi, R.: About deterministic extinction in ratio-dependent predator-prey models. Bull. Math. Biol. 61, 19–32 (1999)
Kot, M.: Elements of Mathematical Ecology. Cambridge University Press, Cambridge (2001)
Garain, K., Mandal, P.S.: Bifurcation Analysis of a prey-predator model with Beddington-DeAngelis type functional response and Allee effect in prey, International Journal of Bifurcation and Chaos, 2018 (accepted)
Kuang, Y., Beretta, E.: Global qualitative analysis of a ratio-dependent predator-prey system. J. Math. Biol. 36, 389–406 (1998)
Kuznetsov, Y.A.: Elements of Applied Bifurcation Theory. Springer, New York (2004)
Lotka, A.J.: A Natural Population Norm i and ii. Washington Academy of Sciences, Washington, DC (1913)
May, R.M.: Stability and Complexity in Model Ecosystems. Princeton University Press, New Jersey (2001)
McGehee, E.A., Schutt, N., Vasquez, D.A., Peacock-Lopez, E.: Bifurcations, and temporal and spatial patterns of a modified lotka-volterra model. Int. J. Bifurc. Chaos 18, 2223–2248 (2008)
Morozov, A., Petrovskii, S., Li, B.L.: Spatiotemporal complexity of patchy invasion in a predator-prey system with the Allee effect. J. Theor. Biol. 238, 18–35 (2006)
Pablo, A., Flores, J.D., Gonzalez-Olivares, E.: Bifurcations and global dynamics in a predator-prey model with a strong Allee effect on the prey and a ratio-dependent functional response. Nonlinear Anal. Real World Appl. 16, 235–249 (2014)
Pal, P.J., Saha, T.: Dynamical complexity of a ratio-dependent predator-prey model with strong additive Allee effect. Appl. Math. 146, 287–298 (2015)
Pal, P.J., Saha, T., Sen, M., Banerjee, M.: A delayed predator-prey model with strong Allee effect in prey population growth. Nonlinear Dyn. 68, 23–42 (2012)
Perko, L.: Differential Equations and Dynamical Systems. Springer, New York (1991)
Sen, M., Morozov, A.: Bifurcation analysis of a ratio-dependent prey-predator model with the Allee effect. Ecol. Complex. 11, 12–27 (2012)
Sen, M., Banerjee, M.: Rich global dynamics in a prey-predator model with Allee effect and density dependent death rate of predator. Int. J. Bifurc. Chaos 25, 10 (2015)
Stephens, P., Sutherland, W.: Consequences of the Allee effect for behavior, ecology and conservation. trends in ecology and evolutionl. Electron. J. Differ. Equ. 14, 401–405 (1999)
Volterra, V.: Fluctuations in the abundance of a species considered mathematically. Nature 118, 558–560 (1926)
Voorn, G., Hemerik, L., Boer, M., Kooi, B.: Heteroclinic orbits indicate over exploitation in predator-prey systems with a strong Allee effect. Math. Biosci. 209, 451–469 (2001)
Wnng, L., Li, W.T.: Periodic solutions and permanence for a delayed nonautonomous ratiodependent predator-prey model with Holling type functional response. J. Comput. Appl. Math. 162(2), 341–357 (2004)
Wang, M., Kot, M.: Speeds of invasion in a model with strong or weak Allee effects. Math. Biosci. 171, 83–97 (2001)
Wang, J., Shi, J., Wei, J.: Predator-prey system with strong Allee effect in prey. J. Math. Biol. 62, 291–331 (2011)
Xiao, D., Ruan, S.: Global dynamics of a ratio-dependent predator-prey system. J. Math. Biol. 43, 268–290 (2001)
Acknowledgements
Partha Sarathi Mandal and Koushik Garain’s research are supported by SERB, DST project [grant: YSS/2015/001548]. Udai Kumar and Rakhi Sharma are supported by fellowship from MHRD, Government of India.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
A Appendix 1
Transversality conditions for saddle-node bifurcation: Let V and W be the eigenvectors of \(J_{E^{*}_{SN}}\) and \(\left[ J_{E^{*}_{SN}}\right] ^{T}\) corresponding to zero eigenvalue respectively.
Then V should satisfy the following matrix equation
where \( T_{11}(u_{sn*}, v_{sn*})=(1-u_{sn*})(\frac{u_{sn*}}{A}-1)-u_{sn*}(\frac{u_{sn*}}{A}-1)+\frac{u_{sn*}}{A}(1-u_{sn*})\), \( a_{12}(u_{sn*}, v_{sn*}) =\frac{Bu_{sn*}^2(u_{sn*}^2-Cv_{sn*}^2)}{(u_{sn*}^2+Cv_{sn*}^2)^2}\), \( a_{22}(u_{sn*}, v_{sn*})=\frac{2BCu_{sn*}v_{sn*}^3}{(u_{sn*}^2+Cv_{sn*}^2)^2}\). Multiplying the second row by \(T_{11}-a_{22}\), first row by \(a_{22}\) and substracting the first row from above matrix, we get
To get the eigenvector the term \((T_{11}(u_{sn*}, v_{sn*})-a_{22}(u_{sn*}, v_{sn*}))(a_{12}(u_{sn*}, v_{sn*})-D-2E_{SN}v_{sn*})+a_{12}(u_{sn*}, v_{sn*})a_{22}(u_{sn*}, v_{sn*})=0\), which implies
and from above matrix equation, we have
Using Eqs. (11) and (12), we get
Proceeding in a similar way the eigenvector of \([J_{E_{SN}^{*}}]^{T}\) is given by,
Let \(F(u,v)=(F_{1}(u,v),F_{2}(u,v))^{T}\). Then \(F_{E}(u,v)=(F_{1E}(u,v),F_{2E}(u,v))^{T}\). We can find from system (3)–(4), \(F_{1E} |_{(E_{SN}^{*};E_{SN})}=\frac{dF_{1}}{dE}|_{(E_{SN}^{*};E_{SN})}=0\) and \(F_{2E} |_{(E_{SN}^{*};E_{SN})}=\frac{dF_{2}}{dE}|_{(E_{SN}^{*};E_{SN})}=-v_{sn*}^2\) and the first transversality condition for saddle node bifurcation becomes
Now for second transversality condition,
\(D^2F(u,v)(V,V)=\displaystyle \sum _{i,j=1}^{2}\frac{\partial ^2F(u,v)}{\partial u_i \partial u_j}v_i v_j\), where \((u,v)=(u_1,u_2)\)(say). Then,
where \(V=(v_{1},v_{2})^T\), \(F_{1u_iu_j}=\frac{\partial ^2F_1}{\partial u_i\partial u_j}\) for \(i,j=1,2\) and similarly for \(F_2\).
Using the equilibrium relation from Eq. (6), we get
where \(I_{0}=-\frac{6u_{sn*}}{A}+\frac{2(1+A)}{A}\), \(S=\frac{2BC(Cv_{sn*}^2-3u_{sn*}^2)}{(u_{sn*}^2+Cv_{sn*}^2)^3}\). We find the expression
B Appendix 2
We calculate the first lyapunov number for stability of Hopf-bifurcation.
We translate the equilibrium point \(E_{1*}(u_{1*}, v_{1*})\) to origin with new coordinate By setting \(x=u-u_{1*} , y=v-v_{1*}\). Then new system in coordinate (x, y) has power series expansion as given below
Where
We can calculate Lypunov first coefficient by using (13) as given below
where \(D_1=ad-bc\). we get the expression for Lypunov first coefficient as:
where
The limit cycle is unstable for \(l_{1} >0\) and stable if \(l_{1} <0\). Therefore, the Hopf-bifurcation is subcritical if \(l_{1} >0\) and supercritical if \(l_{1} <0\).
C Appendix 3
Transversality conditions for Bogdanov-Takens bifurcation : We transform the equilibrium point \(E_{SN}^{*}\) to origin by \(x=u-u_{sn*}, y=v-v_{sn*}\) and we get
where \(a'\), \(b'\), \(c'\) ,\(d'\) are the element of the Jacobian matrix evaluated at an equilibrium point \(E_{SN}^{*}\) and \(p_{11}\), \(p_{12}\), \(p_{22}\), \(q_{11}\), \(q_{12}\), \(q_{22}\) are as follow
Now we use affine transformation \(y_{1}=x\), \(y_{2}=a'x+b'y\) in (13) to get the new transformed system in \((y_{1}, y_{2})\) as:
which can be written as
where \(\lambda =(\lambda _{1}, \lambda _{2})\)
Now
To check the non degeneracy conditions of Bogdanov-Takens bifurcation we have to check the following quantities:
The first condition is clearly satisfied. Also
D Appendix 4
Here we discuss the stability of the axial equilibrium point \(E_{0}(0,0)\) of the model (9)–(10). Now we transform the variables to new variables by replacing \(p=\frac{v}{u}\) and we get the following system
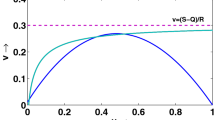
We are interested here of the axial equilibrium points on the p-axis only. Axial equilibrium points on the p-axis are (0, 0) and \((0,\mu _{1,2})\), where \(\mu _{1,2}\) are the two roots of the quadratic equation
So \(\mu _{1}=\frac{B+ \sqrt{B^2+4C(1+D)(B-D-1)}}{2C(1+D)}\) and \(\mu _{2}=\frac{B- \sqrt{B^2+4C(1+D)(B-D-1)}}{2C(1+D)}\). Eigenvalues of the Jacobian matrix evaluated at (0, 0) is 1 and \(B-(1+D)\). Eigenvalues evaluated at \((0,\mu _{1,2})\) are \(-\frac{B \mu _{1,2}}{1+C\mu _{1,2}^2}\) and \(-D-1+\frac{B (1-C\mu _{1,2}^2+2 \mu _{1,2})}{(1+C\mu _{1,2}^2)^2}\). Now we discuss the different cases
- (i)
If \((B-D-1)<0\) and \(B^2+4C(1+D)(B-D-1)<0\), then \((0,\mu _{1,2})\) do not exist and (0, 0) is saddle point.
- (ii)
If \((B-D-1)<0\) and \(B^2+4C(1+D)(B-D-1)>0\), then \((0,\mu _{1,2})\) exist. (0, 0) is saddle point and \((0,\mu _{1,2})\) are stable points.
- (iii)
If \((B-D-1)>0\) then \(B^2+4C(1+D)(B-D-1)>B^2>0\). (0, 0) is unstable and only \((0,\mu _{1})\) exists.
We construct a bifurcation diagram on \(B-E\) plane (see Fig. 10), which describes the above results and also the stability nature of origin. Two curves \((B-D-1)=0\) and \(B^2+4C(1+D)(B-D-1)=0\) divide the bifurcation diagram into three subregions and corresponding phase portraits are also shown in Fig. 11.
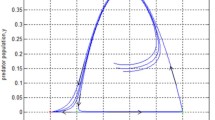
Hence, by blowing-down back (14)–(15), the line \(u=0\) is collapsed to the origin of the system (9)–(10). When \((0,\mu _{1,2})\) are stable, then invariant attracting curve is also mapped to an curve in the first quadrant which passes through the origin. So, the axial equilibrium point \(E_{0}(0,0)\) of the model (9)–(10) is stable at that region.

Bifurcation diagram in \(B-E\) plane of the axial equilibrium point \(E_{0}(0,0)\)

Stability of \(E_{0}(0,0)\) corresponding to Fig.10. a for region A1, b for region A2, (c) for region A3
Rights and permissions
About this article

Cite this article
Mandal, P.S., Kumar, U., Garain, K. et al. Allee effect can simplify the dynamics of a prey-predator model. J. Appl. Math. Comput. 63, 739–770 (2020). https://doi.org/10.1007/s12190-020-01337-4
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12190-020-01337-4