
Abstract
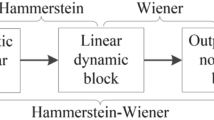
Hammerstein–Wiener model can describe a large number of complicated industrial processes. In this paper, a novel identification method for neuro-fuzzy based Hammerstein–Wiener model is presented. A neuro-fuzzy system with correlation analysis based non-iterative parameter updating algorithm is proposed to model the static nonlinearity of Hammerstein–Winer processes. As a result, the proposed method not only avoid the inevitable restrictions on static nonlinear function encountered by using the polynomial approach, but also overcomes the problems of initialization and convergence of the model parameters, which are usually resorted to trial and error procedure in the existing iterative algorithms used for the identification of Hammerstein–Winer model. In addition, combined separable signals are adopted to identify the Hammerstein–Wiener process, resulting in the identification problem of the linear model separated from that of nonlinear parts. Moreover, one part of the input signals is extended to more general signals, such as binary signals, Gaussian signals or other modulated signals. Examples are used to illustrate the effectiveness of the proposed method.














Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Smith JG, Kamat S, Madhavan KP (2007) Modelling of PH process using wavenet based Hammerstein model. J Process Control 17(6):551–561
Zhang H-T, Li H-X, Chen G-R (2008) Dual-mode predictive control algorithm for constrained Hammerstein systems. Int J Control 81(10):1609–1625
Lakshminarayanan S, Shah SL, Nandakumar K (1995) Identification of Hammerstein models using multivariate statistical tools. Chem Eng Sci 50(22):3599–3613
Biagiola SI, Figueroa JL (2011) Identification of uncertain MIMO Wiener and Hammerstein models. Comput Chem Eng 35(12):2867–2875
Bhandari N, Rollins D (2004) Continuous-time Hammerstein nonlinear modeling applied to distillation. AIChE J 50(2):530–533
Rollins DK, Bhandari N, Bassily AM, Colver GM, Chin ST (2003) A continuous-time nonlinear dynamic predictive modeling method for Hammerstein processes. Ind Eng Chem Res 42(4):860–872
Naeem O, Huesmana AEM (2011) Non-linear model approximation and reduction by new input-state Hammerstein block structure. Comput Chem Eng 35(5):758–773
Bai EW (2002) A blind approach to the Hammerstein–Wiener model identification. Automatica 38(6):967–979
Bai EW (1998) An optimal two-step identification algorithm for Hammerstein–Wiener nonlinear systems. Automatica 34(3):333–338
Crama P, Schoukens J (2004) Hammerstein–Wiener system estimator initialization. Automatica 40(9):1543–1550
Gui WH, Song HY, Yang CH (2008) Hammerstein–Wiener model identified by least-square-support-vector machine and its application. Control Theory Appl 25(3):393–397
Park HC, Sung SW, Lee J (2006) Modeling of Hammerstein–Wiener processes with special input test signals. Ind Eng Chem Res 45:1029–1038
Jia L, Yang AH, Chiu MS (2013) Research on multi-signal based neuro-fuzzy Hammerstein–Wiener model. Acta Autom Sin 39(5):690–696
Enqvist M, Ljung L (2005) Linear approximations of nonlinear FIR systems for separable input processes. Automatica 41(3):459–473
Enqvist M (2006) Identification of Hammerstein systems using separable random multisines. In: Proceedings of the 14th IFAC Symposium on System Identification, 768–773
Jia L, Li XL, Chiu MS (2014) Identification of MIMO neuro-fuzzy Hammerstein model with noises. Commun Comput Inf Sci 461:298–306
Jia L, Chiu MS, Ge SS (2005) A noniterative neuro-fuzzy based identification method for Hammerstein processes. J Process Control 15(7):749–761
Nuttall AH (1958) Theory and application of the separable class of random processes. Technical Report 343. MIT Research Laboratory of Electronics, Cambridge
Bussgang JJ (1952) Crosscorrelation functions of amplitude distorted Gaussian signals. Technical Report 216. MIT Research Laboratory of Electronics, Cambridge
Lee YJ, Sung SW, Park S (2004) Input test signal design and parameter estimation method for the Hammerstein–Wiener processes. Ind Eng Chem Res 43:7521–7530
Acknowledgments
This research was supported by National Natural Science Foundation of China (61374044), Shanghai Science Technology Commission (15510722100,16111106300), Shanghai Municipal Education Commission (14ZZ088).
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
The cross-correlation of u(k) and v(k) is
According to the property of total expectation of random variable, above cross-correlation can be expressed as
Furthermore, from \(v(k)=f(u(k))\), we have
As mentioned in [14, 18], we know that the separability of a process means that the conditional expectation \(E\left( {u(k-\tau )|u(k)} \right) \) should satisfy
where, \(a(\tau )=R_u (\tau )/R_u (0)\)
From Eqs. (52) and (53), we get
In addition, the auto-correlation of u(k) is
According to the properties of expectation and total expectation of random variables, we obtain
From Eq. (53), we have
From Eqs. (54) and (57), we get
Define \(b_0 =\frac{E\left( {v(k)u(k)} \right) }{E\left( {u(k)u(k)} \right) }\), we thus have \(R_{vu} (\tau )=b_0 R_u (\tau )\).
This completes the proof.
Rights and permissions
About this article

Cite this article
Li, J., Qiliang, F. Combined separable signals based neuro-fuzzy Hammerstein–Wiener model. Memetic Comp. 9, 245–259 (2017). https://doi.org/10.1007/s12293-016-0204-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12293-016-0204-3