
Abstract
In this work, we present a variant of the vehicle routing problem for multiple unmanned aerial vehicle operation. The problem was described as a multi-depot vehicle routing problem with separation distance constraints, and two mathematical models were developed to find the best routes under capacity, maximum traveling time, and intervehicle separation constraints. In the first model, the separation distance constraint was proposed using a discrete time window based on previous studies, while the second model restricts the relative difference of departure time between every two arcs within the safety distance. Although the second model was designed using the mixed-integer linear programming model, finding acceptable solutions within a limited computation time was a challenge. Therefore, a decomposition heuristic, which divides the second model into a routing step followed by a scheduling step, and a hybrid tabu search algorithm with constructive initial solution generation were suggested. The performance of the suggested algorithms was evaluated for randomly generated graphs in two-dimensional space, and computational experiments showed that the proposed algorithms can be applied to practical cases with enhanced computational efficiency.








Similar content being viewed by others

References
Bektas T (2006) The multiple traveling salesman problem: an overview of formulations and solution procedures. Omega 34(3):209–219
Berbeglia G, Cordeau JF, Gribkovskaia I, Laporte G (2007) Static pickup and delivery problems: a classification scheme and survey. TOP 15(1):1–31
Calvet L, Wang D, Juan A, Bové L (2019) Solving the multidepot vehicle routing problem with limited depot capacity and stochastic demands. Int Trans Oper Res 26(2):458–484
Christofides N, Mingozzi A, Toth P (1981) Exact algorithms for the vehicle routing problem, based on spanning tree and shortest path relaxations. Math Program 20(1):255–282
Contardo C, Martinelli R (2014) A new exact algorithm for the multi-depot vehicle routing problem under capacity and route length constraints. Discret Optim 12:129–146
Cordeau JF, Maischberger M (2012) A parallel iterated tabu search heuristic for vehicle routing problems. Comput Oper Res 39(9):2033–2050
Cordeau JF, Gendreau M, Laporte G (1997) A tabu search heuristic for periodic and multi‐depot vehicle routing problems. Netw Int J 30(2):105–119
Crevier B, Cordeau JF, Laporte G (2007) The multi-depot vehicle routing problem with inter-depot routes. Eur J Oper Res 176(2):756–773
Escobar JW, Linfati R, Toth P, Baldoquin MG (2014) A hybrid granular tabu search algorithm for the multi-depot vehicle routing problem. J Heuristics 20(5):483–509
Gendreau M, Hertz A, Laporte G (1994) A tabu search heuristic for the vehicle routing problem. Manag Sci 40(10):1276–1290
Glover F (1986) Future paths for integer programming and links to artificial intelligence. Comput Oper Res 13(5):533–549
Habib D, Jamal H, Khan SA (2013) Employing multiple unmanned aerial vehicles for co-operative path planning. Int J Adv Rob Syst 10(5):235
Helsgaun K (2000) An effective implementation of the Lin-Kernighan traveling salesman heuristic. Eur J Oper Res 126(1):106–130
Jiang J, Ng KM (2011) Priority-based routing of unmanned combat aerial vehicles. In: 2011 Defense Science Research Conference and Expo, pp 1–4. IEEE
Kumar SN, Panneerselvam R (2012) A survey on the vehicle routing problem and its variants. Intell Inf Manag 4(3):66–74
Lin S, Kernighan BW (1973) An effective heuristic algorithm for the traveling-salesman problem. Oper Res 21(2):498–516
Otto A, Agatz N, Campbell J, Golden B, Pesch E (2018) Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: a survey. Networks 72(4):411–458
Pallottino L, Feron EM, Bicchi A (2002) Conflict resolution problems for air traffic management systems solved with mixed integer programming. IEEE Trans Intell Transp Syst 3(1):3–11
Richards A, How JP (2002) Aircraft trajectory planning with collision avoidance using mixed integer linear programming. In: IEEE Proceedings of the 2002 American Control Conference 3:1936–1941
Richards A, Schouwenaars T, How JP, Feron E (2002) Spacecraft trajectory planning with avoidance constraints using mixed-integer linear programming. J Guid Control Dyn 25(4):755–764
Ropke S, Cordeau JF (2009) Branch and cut and price for the pickup and delivery problem with time windows. Transp Sci 43(3):267–286
Sadati MEH, Aksen D, Aras N (2020) The r-interdiction selective multi-depot vehicle routing problem. Int Trans Oper Res 27(2):835–866
Schouwenaars T, De Moor B, Feron E, How J (2001) Mixed integer programming for multi-vehicle path planning. In: 2001 European Controlled Conference (ECC), pp 2603–2608. IEEE
Sharma N, Monika M (2015) A literature survey on multi-depot vehicle routing problem. Int J Res Dev 3(4):1752–1757
Subramanian A, Uchoa E, Ochi LS (2013) A hybrid algorithm for a class of vehicle routing problems. Comput Oper Res 40(10):2519–2531
Taillard É (1993) Parallel iterative search methods for vehicle routing problems. Networks 23(8):661–673
Toth P, Vigo D (eds) (2002) The vehicle routing problem. Society for Industrial and Applied Mathematics
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
1.1 Proof: \({{\varvec{H}}}_{{\varvec{i}}{\varvec{j}}{{\varvec{i}}}^{\boldsymbol{^{\prime}}}{{\varvec{j}}}^{\boldsymbol{^{\prime}}}}\) is a convex set in \({\mathbb{R}}^{+}\)
Let \(\delta\) be the departure time difference between arcs \(\left(i,j\right)\) and \(\left({i}{^{\prime}},{j}{^{\prime}}\right)\), which is assumed to be in \({\mathbb{R}}^{+}\). Also, we assume that the departure time of arc \(\left(i,j\right)\) is 0.
-
1)
Time range
Let \({T}_{ij{i}{^{\prime}}{j}{^{\prime}}}\left(\delta \right)\in T\) be the time range in which both vehicles exist on the arcs concurrently when the vehicle on arc \(\left({i}{^{\prime}},{j}{^{\prime}}\right)\) depart from node \({i}{^{\prime}}\) at \(\delta\). If one vehicle on arc \(\left(i,j\right)\) departs from node \(i\) at time \(0\), it completes the service at node \(j\) at time \(\left({C}_{ij}+{S}_{j}\right)\), and the other vehicle on arc \(\left({i}{^{\prime}},{j}{^{\prime}}\right)\) starts and finishes at time \(\delta\) and \(\left({C}_{{i}{^{\prime}}{j}{^{\prime}}}+{S}_{{j}{^{\prime}}}+\delta \right)\), respectively. Equation (A1) is the definition of \({T}_{ij{i}{^{\prime}}{j}{^{\prime}}}\left(\delta \right)\) for every \(\left\{\left(i,j\right),\left({i}{^{\prime}},{j}{^{\prime}}\right)\right\}\in P\).
$${T}_{ij{i}{^{\prime}}{j}{^{\prime}}}\left(\delta \right)=\left\{t |t\in T, \delta \le t\le \mathrm{min}\left({C}_{ij}+{S}_{j},{C}_{{i}{^{\prime}}{j}{^{\prime}}}+{S}_{{j}{^{\prime}}}+\delta \right)\right\}$$(A1) -
2)
Euclidean distance
The 2D locations of the vehicles on arcs \(\left(i,j\right)\) and \(\left({i}{^{\prime}},{j}{^{\prime}}\right)\) at time \(t\in {T}_{ij{i}{^{\prime}}{j}{^{\prime}}}\left(\delta \right)\) are suggested to be (\({L}_{ij}^{X}\left(\delta ,t\right),{L}_{ij}^{Y}\left(\delta ,t\right),{L}_{ij}^{Z}\left(\delta ,t\right)\)) and (\({L}_{{i}{^{\prime}}{j}{^{\prime}}}^{X}\left(\delta ,t\right),{L}_{{i}{^{\prime}}{j}{^{\prime}}}^{Y}\left(\delta ,t\right),{L}_{{i}{^{\prime}}{j}{^{\prime}}}^{Z}\left(\delta ,t\right)\)) in Eqs. (A2) and (A3), respectively. Each location function is divided into two cases since it is assumed that every vehicle stays at the customer node during its service time.
$$\left({L}_{ij}^{X}\left(\delta ,t\right),{L}_{ij}^{Y}\left(\delta ,t\right),{L}_{ij}^{Z}\left(\delta ,t\right)\right)=\left\{\begin{array}{cc}\left({L}_{i}^{X}+{V}_{ij}^{X}t,{L}_{i}^{Y}+{V}_{ij}^{Y}t,{L}_{i}^{Z}+{V}_{ij}^{Z}t\right)& if \, t\le {C}_{ij}\\ \left({L}_{j}^{X}, {L}_{j}^{Y}, {L}_{j}^{Z}\right)& o.w.\end{array}\right.$$(A2)$$\left({L}_{{i}{^{\prime}}{j}{^{\prime}}}^{X}\left(\delta ,t\right),{L}_{{i}{^{\prime}}{j}{^{\prime}}}^{Y}\left(\delta ,t\right),{L}_{{i}{^{\prime}}{j}{^{\prime}}}^{Z}\left(\delta ,t\right)\right)=\left\{\begin{array}{cc}\left({L}_{{i}{^{\prime}}}^{X}+{V}_{{i}{^{\prime}}{j}{^{\prime}}}^{X}\left(t-\delta \right),{L}_{{i}{^{\prime}}}^{Y}+{V}_{{i}{^{\prime}}{j}{^{\prime}}}^{Y}\left(t-\delta \right),{L}_{{i}{^{\prime}}}^{Z}+{V}_{{i}{^{\prime}}{j}{^{\prime}}}^{Z}\left(t-\delta \right)\right)& if \, t-\delta \le {C}_{{i}{^{\prime}}{j}{^{\prime}}}\\ \left({L}_{{j}{^{\prime}}}^{X}, {L}_{{j}{^{\prime}}}^{Y}, {L}_{{j}{^{\prime}}}^{Z}\right)& o.w.\end{array}\right.$$(A3)The Euclidean distance between two vehicles at every time \(t\in {T}_{ij{i}{^{\prime}}{j}{^{\prime}}}\left(\delta \right)\) is denoted by \({E}_{ij{i}{^{\prime}}{j}{^{\prime}}}\left(\delta ,t\right)={\Vert \left({L}_{ij}^{X}\left(\delta ,t\right),{L}_{ij}^{Y}\left(\delta ,t\right),{L}_{ij}^{Z}\left(\delta ,t\right)\right)-\left({L}_{{i}{^{\prime}}{j}{^{\prime}}}^{X}\left(\delta ,t\right),{L}_{{i}{^{\prime}}{j}{^{\prime}}}^{Y}\left(\delta ,t\right),{L}_{{i}^{{\prime}}{j}{^{\prime}}}^{Z}\left(\delta ,t\right)\right)\Vert }_{2}\), and Eq. (A4) shows the details of \({E}_{ij{i}{^{\prime}}{j}{^{\prime}}}\left(\delta ,t\right)\) under the consideration of staying for service at the end node on each arc.
$${E}_{ij{i}{^{\prime}}{j}{^{\prime}}}{\left(\delta ,t\right)}^{2}= \left\{\begin{array}{l}\begin{array}{ll}{\left\{{L}_{i}^{X}+{V}_{ij}^{X}t-{L}_{{i}{^{\prime}}}^{X}-{V}_{{i}{^{\prime}}{j}{^{\prime}}}^{X}\left(t-\delta \right)\right\}}^{2}+{\left\{{L}_{i}^{Y}+{V}_{ij}^{Y}t-{L}_{{i}{^{\prime}}}^{Y}-{V}_{{i}{^{\prime}}{j}{^{\prime}}}^{Y}\left(t-\delta \right)\right\}}^{2}\\ \quad+{\left\{{L}_{i}^{Z}+{V}_{ij}^{Z}t-{L}_{{i}{^{\prime}}}^{Z}-{V}_{{i}{^{\prime}}{j}{^{\prime}}}^{Z}\left(t-\delta \right)\right\}}^{2}\quad \mathrm{if} \, t < \mathrm{min}\left({C}_{ij},{C}_{{i}{^{\prime}}{j}{^{\prime}}}+\delta \right)\\ {\left\{{L}_{j}^{X}-{L}_{{i}{^{\prime}}}^{X}-{V}_{{i}{^{\prime}}{j}{^{\prime}}}^{X}\left(t-\delta \right)\right\}}^{2}+{\left\{{L}_{j}^{Y}-{L}_{{i}{^{\prime}}}^{Y}-{V}_{{i}{^{\prime}}{j}{^{\prime}}}^{Y}\left(t-\delta \right)\right\}}^{2}\\ \quad+{\left\{{L}_{j}^{Z}-{L}_{{i}{^{\prime}}}^{Z}-{V}_{{i}{^{\prime}}{j}{^{\prime}}}^{Z}\left(t-\delta \right)\right\}}^{2}\quad \mathrm{if} \, {C}_{ij}\le t < {C}_{{i}{^{\prime}}{j}{^{\prime}}}+\delta \end{array}\\ \begin{array}{ll}{\left\{{L}_{i}^{X}+{V}_{ij}^{X}t-{L}_{{j}{^{\prime}}}^{X}\right\}}^{2}+{\left\{{L}_{i}^{Y}+{V}_{ij}^{Y}t-{L}_{{j}{^{\prime}}}^{Y}\right\}}^{2}\\ \quad+{\left\{{L}_{i}^{Z}+{V}_{ij}^{Z}t-{L}_{{j}{^{\prime}}}^{Z}\right\}}^{2}\quad \mathrm{if} \, {C}_{{i}{^{\prime}}{j}{^{\prime}}}+\delta \le t<{C}_{ij}\\ {\left\{{L}_{J}^{X}-{L}_{{j}{^{\prime}}}^{X}\right\}}^{2}+{\left\{{L}_{j}^{Y}-{L}_{{j}{^{\prime}}}^{Y}\right\}}^{2}\\ \quad+{\left\{{L}_{j}^{Z}-{L}_{{j}{^{\prime}}}^{Z}\right\}}^{2}\quad \mathrm{if} \mathrm{max}\left({C}_{ij},{C}_{{i}{^{\prime}}{j}{^{\prime}}}+\delta \right)\le t\end{array}\end{array}\right.$$(A4) -
3)
Infeasible range of the departure time difference
The departure time difference \(\delta\) is in \({H}_{ij{i}{^{\prime}}{j}{^{\prime}}}\) if there exists a time \(t\in {T}_{ij{i}{^{\prime}}{j}^{{\prime}}}\left(\delta \right)\) where \({E}_{ij{i}{^{\prime}}{j}{^{\prime}}}\left(\delta ,t\right)\) is less than the safety distance, \(B\). Equation (A5) below is the definition of \({H}_{ij{i}{^{\prime}}{j}{^{\prime}}}\), which is the union of partial infeasible ranges:
$${H}_{ij{i}{^{\prime}}{j}{^{\prime}}}=\left\{\delta | {E}_{ij{i}{^{\prime}}{j}{^{\prime}}}{\left(\delta ,*\right)}^{2}=\underset{t\in {T}_{\mathit{ij}{i}{^{\prime}}{j}{^{\prime}}}\left(\delta \right)}{\mathrm{min}}\left\{{E}_{ijij}{\left(\delta ,t\right)}^{2}\right\}<{B}^{2}\right\}$$$$={H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(1\right)}\cup {H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(2\right)}\cup {H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(3\right)}\cup {H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(4\right)}$$(A5)$${H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(1\right)}=\left\{\delta | {E}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(1\right)}{\left(\delta ,*\right)}^{2}=\underset{\delta \le t<\mathrm{min}\left({C}_{\mathit{ij}},{C}_{{i}{^{\prime}}{j}{^{\prime}}}+\delta \right)}{\mathrm{min}}\left\{{E}_{ijij}{\left(\delta ,t\right)}^{2}\right\}<{B}^{2}\right\}$$(A6)$${H}_{ij{i}^{{\prime}}{j}{^{\prime}}}^{\left(2\right)}=\left\{\delta | {E}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(2\right)}{\left(\delta ,*\right)}^{2}=\underset{{C}_{\mathit{ij}}\le t<{C}_{{i}{^{\prime}}{j}{^{\prime}}}+\delta }{\mathrm{min}}\left\{{E}_{ijij}{\left(\delta ,t\right)}^{2}\right\}<{B}^{2}\right\}$$(A7)$${H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(3\right)}=\left\{\delta |{E}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(3\right)}{\left(\delta ,*\right)}^{2}=\underset{{C}_{{i}{^{\prime}}{j}{^{\prime}}}+\delta \le t<{C}_{\mathit{ij}}}{\mathrm{min}}\left\{{E}_{ijij}{\left(\delta ,t\right)}^{2}\right\}<{B}^{2}\right\}$$(A8)$${H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(4\right)}=\left\{\delta | {E}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(4\right)}{\left(\delta ,*\right)}^{2}=\underset{\mathrm{max}\left({C}_{\mathit{ij}},{C}_{{i}{^{\prime}}{j}{^{\prime}}}+\delta \right)\le t<\mathrm{min}\left({C}_{\mathit{ij}}+{S}_{j},{C}_{{i}{^{\prime}}{j}{^{\prime}}}+{S}_{{j}{^{\prime}}}+\delta \right)}{\mathrm{min}}\left\{{E}_{ijij}{\left(\delta ,t\right)}^{2}\right\}<{B}^{2}\right\}$$(A9) -
4)
Convexity of the infeasible range
Since \({E}_{ijij}^{\left(n\right)}{\left(\delta ,t\right)}^{2}\) for every \(n\in \left\{\mathrm{1,2},\mathrm{3,4}\right\}\) in equations (A6)–(A9) is the polynomial function of \(\delta\) and \(t\), all partial infeasible ranges are a convex set of \(\delta\), denoted as \({H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(n\right)}=\left({F}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(n\right)},{G}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(n\right)}\right)\) for every \(n\in \left\{\mathrm{1,2},\mathrm{3,4}\right\}\).
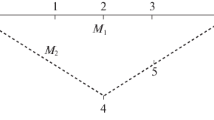
Let \({\Delta }_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(n\right)}\) be the subset of \({H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(n\right)}\) with a minimum value of the Euclidean distance function, \({\Delta }_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(n\right)}=\underset{\delta }{\mathrm{argmin}}\left\{{E}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(n\right)}{\left(\delta ,*\right)}^{2} | \delta \in {H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(n\right)}\right\}\), and \({\delta }_{\mathrm{min}}^{\left(n\right)}\) be the minimum value of \(\delta\) in \({\Delta }_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(n\right)}\), \({\delta }_{\mathrm{min}}^{\left(n\right)}=\mathrm{min}\left\{{\Delta }_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(n\right)}\right\},\mathrm{ for every }n\in \left\{\mathrm{1,2},\mathrm{3,4}\right\}\). Below Fig. A1, which is an illustration of \({\delta }_{\mathrm{min}}^{\left(2\right)}\), ensures that \({\delta }_{\mathrm{min}}^{\left(2\right)}\) is in \({H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(1\right)}\) if both \({H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(1\right)}\) and \({H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(2\right)}\) are not empty sets. Since both \({H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(1\right)}\) and \({H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(2\right)}\) are convex sets, \({H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(1\right)}\cup {H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(2\right)}\) is also a convex set. It can be affirmed similarly that \({\delta }_{\mathrm{min}}^{\left(3\right)}\) and \({\delta }_{\mathrm{min}}^{\left(4\right)}\) are in \({H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(1\right)}\); therefore, \({H}_{ij{i}{^{\prime}}{j}{^{\prime}}}={H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(1\right)}\cup {H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(2\right)}\cup {H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(3\right)}\cup {H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(4\right)}\) is a convex set of \(\delta\) in \({\mathbb{R}}^{+}\). ■

A brief illustration that \({\delta }_{\mathrm{min}}^{\left(2\right)}\) is in \({H}_{ij{i}{^{\prime}}{j}{^{\prime}}}^{\left(1\right)}\)
Rights and permissions
About this article

Cite this article
Uhm, H.S., Lee, Y.H. Vehicle routing problem under safe separation distance for multiple unmanned aerial vehicle operation. Oper Res Int J 22, 5107–5136 (2022). https://doi.org/10.1007/s12351-022-00701-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12351-022-00701-5