
Abstract
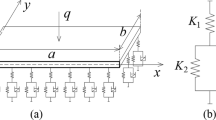
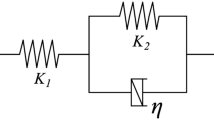
This work underlines the importance of the application of fractional-order derivative damping model in the modelling of the viscoelastic foundation, by demonstrating the effect of various orders of the fractional derivative on the dynamic response of plates resting on the viscoelastic foundation, subjected to concentrated step load. The foundation of the plate is modelled as a fractionally-damped Kelvin–Voigt model. Modal superposition method and Triangular strip matrix approach are used to solve the partial fractional differential equations of motion. The influence of (a) fractional-order derivative, (b) foundation stiffness, and (c) foundation damping viscosity parameter on the dynamic response of the plate are investigated. Theoretical results show that with the increase in the order of derivative, the damping of the system increases, which leads to decreased dynamic response. The results obtained from the fractional-order damping model and integer-order damping model are compared. The results are verified with literature and numerical results (ANSYS).








Similar content being viewed by others
Abbreviations
- \(x,y,z\) :
-
Axis of the reference system
- t :
-
Time [s]
- L :
-
Length of the plate [m]
- B :
-
Width of the plate [m]
- D :
-
Flexural rigidity of the plate [Pa.\({\mathrm{m}}^{3}\)]
- h :
-
Thickness of the plate [m]
- E :
-
Elastic modulus [\(\mathrm{N}/{\mathrm{m}}^{2}]\)
- \(\upsilon \) :
-
Poisson’s ratio
- \({C}_{0}\) :
-
Viscous damping coefficient \([{\mathrm{Ns}}^{{\alpha }}/{\mathrm{m}}^{3}]\)
- \(K\) :
-
Stiffness of the foundation \([\mathrm{N}/{\mathrm{m}}^{3}]\)
- \(\rho \) :
-
Density of the beam material [\(\mathrm{kg}/{\mathrm{m}}^{3}]\)
- \(F\) :
-
Magnitude of force \(\left[\mathrm{N}\right]\)
- \(\alpha \) :
-
Order of derivative
- \(\delta \) :
-
Dirac delta function
- \(\Gamma \) :
-
Gamma function
- [GM]:
-
Generalized mass matrix
- [GC]:
-
Generalized damping
- [GK]:
-
Generalized stiffness matrix
- {GF}:
-
Generalized force vector
- N :
-
Number of modal superposition terms
- \(w\) :
-
Dynamic displacement \(\left[\mathrm{m}\right]\)
- \({M}_{x},{M}_{y}\) :
-
Dynamic bending moment \(\left[\mathrm{Nm}\right]\)
- \({\omega }_{r}\) :
-
Rth complex natural frequency
- \({\sigma }_{r}\) :
-
Rth damping coefficient
- \({\Omega }_{r}\) :
-
Rth damped natural frequency [rad/s]
- \({\zeta }_{r}\left(t\right)\) :
-
Rth generalized coordinate
- \({\varphi }_{i}\left(x\right)\) :
-
Ith beam eigenfunction
References
Alotta G, Barrera O, Cocks ACF, Di Paola M (2017) On the behavior of a three-dimensional fractional viscoelastic constitutive model. Meccanica 52(9):2127–2142
Asgari M, Permoon MR, Haddadpour H (2017) Stability analysis of a fractional viscoelastic plate strip in supersonic flow under axial loading. Meccanica 52(7):1495–1502
Atanackovic TM, Janev M, Konjik S, Pilipovic S, Zorica D (2015) Vibrations of an elastic rod on a viscoelastic foundation of complex fractional kelvin–voigt type. Meccanica 50(7):1679–1692
Bahmyari E, Banatehrani MM, Ahmadi M, Bahmyari M (2013) Vibration analysis of thin plates resting on pasternak foundations by element free galerkin method. Shock and Vibration 20(2):309–326
Cai W, Chen W, Xu W (2017) Fractional modeling of pasternak-type viscoelastic foundation. Mech Time-Dependent Materials 21(1):119–131
Celauro C, Fecarotti C, Pirrotta A, Collop AC (2012) Experimental validation of a fractional model for creep/recovery testing of asphalt mixtures. Constr Build Mater 36:458–466
Chen L, Hao Y, Huang T, Yuan L, Zheng S, Yin L (2020) Chaos in fractional-order discrete neural networks with application to image encryption. Neural Netw.
Chen L, Huang T, Machado JAT, Lopes AM, Chai Y, Wu R (2019) Delay-dependent criterion for asymptotic stability of a class of fractional-order memristive neural networks with time-varying delays. Neural Netw 118:289–299
Datta P, Ray MC (2018) Smart damping of geometrically nonlinear vibrations of composite shells using fractional order derivative viscoelastic constitutive relations. Mech Adv Mater Struct 25(1):62–78
Datta N, Troesch AW (2012) Dynamic response of kirchhoff’s plates to transient hydrodynamic impact loads. Marine Syst Ocean Technol 7(2):79–94
Di Paola M, Pirrotta A, Valenza A (2011) Visco-elastic behavior through fractional calculus: an easier method for best fitting experimental results. Mech Mater 43(12):799–806
Eldred LB, Baker WP, Palazotto AN (1995) Kelvin–voigt versus fractional derivative model as constitutive relations for viscoelastic materials. AIAA J 33(3):547–550
Eyebe G, Betchewe G, Mohamadou A, Kofane T (2018) Nonlinear vibration of a nonlocal nanobeam resting on fractional-order viscoelastic pasternak foundations. Fractal Fractional 2(3):21
Farno E, Baudez J-C, Eshtiaghi N (2018) Comparison between classical kelvin–voigt and fractional derivative kelvin–voigt models in prediction of linear viscoelastic behaviour of waste activated sludge. Sci Total Environ 613:1031–1036
Freundlich J (2019) Transient vibrations of a fractional kelvin–voigt viscoelastic cantilever beam with a tip mass and subjected to a base excitation. J Sound Vib 438:99–115
Freundlich JK (2016) Dynamic response of a simply supported viscoelastic beam of a fractional derivative type to a moving force load. J Theoretical Appl Mech 54(4):1433–1445
Gonçalves PJP, Brennan MJ, Elliott SJ (2007) Numerical evaluation of high-order modes of vibration in uniform euler-bernoulli beams. J Sound Vib 301(3–5):1035–1039
Hashemi SH, Mehrabani H, Ahmadi-Savadkoohi A (2015a) Exact solution for free vibration of coupled double viscoelastic graphene sheets by viscopasternak medium. Compos B Eng 78:377–383
Hashemi SH, Mehrabani H, Ahmadi-Savadkoohi A (2015b) Forced vibration of nanoplate on viscoelastic substrate with consideration of structural damping: an analytical solution. Compos Struct 133:8–15
Huang ZY, Lü CF, Chen WQ (2008) Benchmark solutions for functionally graded thick plates resting on winkler-pasternak elastic foundations. Compos Struct 85(2):95–104
Huang M-H, Thambiratnam DP (2001) Deflection response of plate on winkler foundation to moving accelerated loads. Eng Struct 23(9):1134–1141
Khetib M, Abbad H, Elmeiche N, Mechab I (2019) Effect of the viscoelastic foundations on the free vibration of functionally graded plates. Int J Struct Stability Dyn 19(11).
Kiasat MS, Zamani HA, Aghdam MM (2014) On the transient response of viscoelastic beams and plates on viscoelastic medium. Int J Mech Sci 83:133–145
Li M, Qian T, Zhong Y, Zhong H (2014) Dynamic response of the rectangular plate subjected to moving loads with variable velocity. J Eng Mechanics 140(4):06014001
Luong VH, Cao TNT, Reddy JN, Ang KK, Tran MT, Dai J (2018) Static and dynamic analyses of mindlin plates resting on viscoelastic foundation by using moving element method. Int J Struct Stab Dyn 18(11):1850131
Lu J-G, Chen Y (2013) Stability and stabilization of fractional-order linear systems with convex polytopic uncertainties. Fractional Calculus and Applied Analysis 16(1):142–157
Mukhopadhyay M (2008) Structural dynamics: vibrations & systems, Ane Books India.
Nazarimofrad E, Zahrai SM, Kholerdi SES (2018) Effect of rotationally restrained and pasternak foundation on buckling of an orthotropic rectangular mindlin plate. Mech Adv Mater Struct 25(7):592–599
Podlubny I, Chechkin A, Skovranek T, Chen Y, Jara BMV (2009) Matrix approach to discrete fractional calculus II: partial fractional differential equations. J Comput Phys 228(8):3137–3153
Podlubny I (2000) Matrix approach to discrete fractional calculus. Fractional Calculus Appl Anal 3(4):359–386
Podlubny I (1998) Fractional differential equations: an introduction to fractional derivatives, fractional differential equations, to methods of their solution and some of their applications, Elsevier.
Praharaj RK, Datta N (2020a) Dynamic response spectra of fractionally damped viscoelastic beams subjected to moving load. Mech Based Des Struct Mach. https://doi.org/10.1080/15397734.2020.1725563
Praharaj RK, Datta N (2020b) Dynamic response of plates resting on a fractional viscoelastic foundation and subjected to a moving load. Mech Based Design Struct Mach. https://doi.org/10.1080/15397734.2020.1776621
Praharaj RK, Datta N (2020c) Dynamic response of Euler–Bernoulli beam resting on fractionally damped viscoelastic foundation subjected to a moving point load. Mech Based Design Struct Mach. https://doi.org/10.1177/0954406220932597
Praharaj RK, Datta N, Sunny MR, (2020) Dynamic response of fractionally damped viscoelastic plates subjected to a moving point load. J Vib Acoustics. https://doi.org/10.1115/1.4046485
Ramirez LES, Coimbra CFM (2007) A variable order constitutive relation for viscoelasticity. Ann Phys 16(7–8):543–552
Rossikhin YA, Shitikova MV, Trung, P. T., (2016) Application of the fractional derivative kelvin–voigt model for the analysis of impact response of a Kirchhoff–love plate. WSEAS Trans Math 15:498–501
Rossikhin YA, Shitikova MV (2011) The analysis of the impact response of a thin plate via fractional derivative standard linear solid model. J Sound Vib 330(9):1985–2003
Rossikhin YA, Shitikova MV (2006) Analysis of damped vibrations of linear viscoelastic plates with damping modeled with fractional derivatives. Signal Process 86(10):2703–2711
Shukla SK, Gupta A, Sivakugan N (2011) Analysis of circular elastic plate resting on pasternak foundation by strain energy approach. Geotech Geol Eng 29(4):613–618
Sun L (2003) Dynamic response of kirchhoff plate on a viscoelastic foundation to harmonic circular loads. J Appl Mech 70(4):595–600
Sunny MR, Kapania RK, Moffitt RD, Mishra A, Goulbourne N (2010) A modified fractional calculus approach to model hysteresis. J Appl Mech 77(3):31004
Xu K, Chen L, Wang M, Lopes AM, Tenreiro Machado JA, Zhai H (2020) Improved decentralized fractional PD control of structure vibrations. Mathematics 8(3):326
Zamani HA, Aghdam MM, Sadighi M (2017) Free vibration analysis of thick viscoelastic composite plates on visco-pasternak foundation using higher-order theory. Compos Struct 182:25–35
Zhang C, Zhu H, Shi B, Liu L (2014) Theoretical Investigation of Interaction between a rectangular plate and fractional viscoelastic foundation. J Rock Mech Geotech Eng 6(4):373–379
Zhu H-H, Liu L-C, Pei H-F, Shi B (2012) Settlement analysis of viscoelastic foundation under vertical line load using a fractional kelvin–voigt model. Geomech Eng 4(1):67–78
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Communicated by José Tenreiro Machado.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A
Appendix A
1.1 Triangular strip matrix approach for the integer/fractional order differential equations
The triangular strip matrix approach is a powerful numerical technique, which can be used for the solution of the integer- and fractional-order differential equations (Podlubny 2000). This approach deals with matrices of a specific structure, which are called triangular strip matrices. The properties and operations of the triangular strip matrices are discussed in details (Podlubny 2000; Podlubny et al. 2009). The approach represents the matrix form (lower triangular strip matrix or upper triangular strip matrix) of integer/fractional-order differential equations. The differential equation may contain integer-order derivative and/or the fractional-order derivative terms as seen in Eq. (19). According to the triangular matrix approach, each term of the differential equation has to be represented in the matrix form. In this work, each term is represented in the form of a lower triangular strip matrix. The following steps are used to solve the fractional differential equation Eq. 19, to find the modal generalized coordinate \(\zeta \left(t\right)\). Consider a function \(\zeta \left(t\right)\), defined in [a, b], the matrix form representation of its integer/fractional order derivatives can be performed by the following steps.
Step 1: Create equidistant nodes with constant step size h: \({t}_{p}=a+ph\left(p=\mathrm{0,1},2,. . .,N\right)\), in the range\(\left[a,b\right]\), where \({t}_{0}=a\) and\({t}_{N}=a+Nh= b\).
Step 2: Matrix representation of integer-order derivative. Let us consider the approximation of the first-order derivative \({\zeta }^{^{\prime}}\left(t\right)\) at the various interval points\({t}_{p}\),\(p=\mathrm{0,1},2,. . .,N\), using first-order backward differences:
The above expression can be written in matrix form as:
Similarly, the approximation of the second-order derivative \({\zeta }^{{{\prime\prime}}}\left(t\right)\) using second-order backward differences:
The matrix form of the second-order derivative can be represented as:
The matrix form of \(q\)-th integer-order derivative can be computed as:
Similarly, the triangular strip matrix can also be applied for the derivative of the real order. Here, the left-sided fractional derivative of fractional order \(\alpha \) of the function \(\zeta \left(t\right)\) can be written as:
Using the backward fractional difference approximation for the \(\alpha \)-th derivative at the interval points \({t}_{p, }p=\mathrm{1,2},\dots ,N\) can be computed as:
The matrix form of \(\alpha \)-th order derivative can be represented as:
Step 3: Make the system matrix for the entire differential equation including the right-hand side.
Step 4: Apply zero initial conditions, i.e., we have to remove the rows and columns corresponding to that initial conditions. For the non-zero initial conditions, an auxiliary function is used to make the problem with zero initial conditions (Podlubny 2000).
Step 5: Solve the linear algebraic equations to get numerical solutions.
The accuracy of this approach purely depends on the step size h, i.e., a smaller step size leads to higher accuracy.
Rights and permissions
About this article

Cite this article
Praharaj, R.K., Datta, N. On the transient response of plates on fractionally damped viscoelastic foundation. Comp. Appl. Math. 39, 256 (2020). https://doi.org/10.1007/s40314-020-01285-6
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-020-01285-6