
Abstract
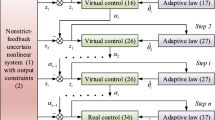
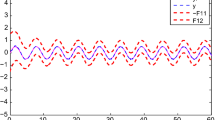
This article investigates the fixed-time adaptive fuzzy output-feedback control for nontriangular structural nonlinear systems with multiple objective constraints, where the fuzzy logic systems (FLSs) are employed to construct a state observer to estimate the unavailable states. Firstly, a modified fractional-order filter (FOF) is adopted to handle the issue of singularity inherent in the constraint domain under the backstepping framework. Meanwhile, the error compensation signal is designed to eliminate the negative effect of filter errors. Secondly, a barrier Lyapunov function (BLF) is utilized to accommodate the multiple objective constraints. Furthermore, the event-triggered rule with a relative threshold is constructed to neutralize the communication burden. Following the fixed-time stability criterion, it is demonstrated that the proposed control scheme not only ensures that the tracking error is adjusted to a residual set within a fixed time, but also multiple objective functions are confined within the specified range. Finally, a simulation practical example is implemented to confirm the validity and potential of the theoretical results.






Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Federico, B.A., Krstic, M.: Backstepping-forwarding control and observation for hyperbolic PDEs with fredholm integrals. IEEE Trans. Automat. Control 60(8), 2145–2160 (2015)
Ma, H., Liang, H., Zhou, Q., Ahn, C.K.: Adaptive dynamic surface control design for uncertain nonlinear strict-feedback systems with unknown control direction and disturbances. IEEE Transactions on Systems, Man, and Cybernetics: Systems 49(3), 506–515 (2018)
Min, H., Xu, S., Zhang, B., Ma, Q.: Globally adaptive control for stochastic nonlinear time-delay systems with perturbations and its application. Automatica 102, 105–110 (2019)
Wang, W., Tong, S.: Adaptive fuzzy containment control of nonlinear strict-feedback systems with full state constraints. IEEE Trans. Fuzzy Syst. 27(10), 2024–2038 (2019)
Wang, N., Gao, Y., Sun, Z., Zheng, Z.: Nussbaum-based adaptive fuzzy tracking control of unmanned surface vehicles with fully unknown dynamics and complex input nonlinearities. Int. J. Fuzzy. Syst. 20(1), 259–268 (2018)
Zhang, Q., Zhai, D., Dong, J.: Observer-based adaptive fuzzy decentralized control of uncertain large-scale nonlinear systems with full state constraints. Int. J. Fuzzy. Syst. 21(4), 1085–1103 (2019)
Sun, K., Karimi, H.R., Qiu, J.: Finite-time fuzzy adaptive quantized output feedback control of triangular structural systems. Information Sciences 557, 153–169 (2021)
Tong, S., Min, X., Li, Y.: Observer-based adaptive fuzzy tracking control for strict-feedback nonlinear systems with unknown control gain functions. IEEE Trans. Cybernet. 50(9), 3903–3913 (2020)
Swaroop, D., Hedrick, J.K., Yip, P.P., Gerdes, J.C.: Dynamic surface control for a class of nonlinear systems. IEEE Trans. Automat. Control 45(10), 1893–1899 (2000)
Song, S., Zhang, B., Song, X., Zhang, Z.: Neuro-fuzzy-based adaptive dynamic surface control for fractional-order nonlinear strict-feedback systems with input constraint. IEEE Trans. Syst. Man Cybernet. Syst. 51(6), 3575–3586 (2021)
Dong, W., Farrell, J.A., Polycarpou, M.M., Djapic, V., Sharma, M.: Command filtered adaptive backstepping. IEEE Trans. Control Syst. Technol. 20(3), 566–580 (2011)
Xia, J., Zhang, J., Feng, J., Wang, Z., Zhuang, G.: Command filter-based adaptive fuzzy control for nonlinear systems with unknown control directions. IEEE Trans. Syst. Man Cybernet. Syst. 51(3), 1945–1953 (2019)
Song, S., Park, J.H., Zhang, B., Song, X., Zhang, Z.: Adaptive command filtered neuro-fuzzy control design for fractional-order nonlinear systems with unknown control directions and input quantization. IEEE Trans. Syst. Man Cybernet. Syst. 51(11), 7238–7249 (2021)
Zhang, J., Li, S., Ahn, C.K., Xiang, Z.: Decentralized event-triggered adaptive fuzzy control for nonlinear switched large-scale systems with input delay via command-filtered backstepping. IEEE Trans. Fuzzy Syst. https://doi.org/10.1109/TFUZZ.2021.3066297
Sun, W., Su, S.F., Wu, Y., Xia, J., Truong, N.V.: Adaptive fuzzy control with high-order barrier lyapunov functions for high-order uncertain nonlinear systems with full-state constraints. IEEE Trans. Fuzzy Syst. 50(8), 3424–3432 (2020)
Zhao, L., Liu, G., Yu, J.: Finite-time adaptive fuzzy tracking control for a class of nonlinear systems with full-state constraints. IEEE Trans. Fuzzy Syst. 29(8), 2246–2255 (2020)
Yu, J., Zhao, L., Yu, H., Lin, C.: Barrier Lyapunov functions-based command filtered output feedback control for full-state constrained nonlinear systems. Automatica 105, 71–79 (2019)
Zhang, H., Liu, Y., Wang, Y.: Observer-based finite-time adaptive fuzzy control for nontriangular nonlinear systems with full-state constraints. IEEE Trans. Cybernet. 51(3), 1110–1120 (2020)
Liu, J., Xie, K.: Emergency materials transportation model in disasters based on dynamic programming and ant colony optimization. Kybernetes 46(4), 656–671 (2017)
Cui, Q., Wang, Y., Song, Y.: Neuroadaptive fault-tolerant control under multiple objective constraints with applications to tire production systems. IEEE Transactions on Neural Networks and Learning Systems 32(8), 3391–3400 (2020)
Liu, L., Zhao, W., Liu, Y., Tong, S., Wang, Y.: Adaptive finite-time neural network control of nonlinear systems with multiple objective constraints and application to electromechanical system. IEEE Trans. Neural Networks and Learning Syst. 32(12), 5416–5426 (2020)
Wang, H., Kang, S., Feng, Z.: Finite-time adaptive fuzzy command filtered backstepping control for a class of nonlinear systems. Int. J. Fuzzy. Syst. 21(8), 2575–2587 (2019)
Polyakov, A.: Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Automat. Control 57(8), 2106–2110 (2011)
Chen, M., Wang, H., Liu, X.: Adaptive fuzzy practical fixed-time tracking control of nonlinear systems. IEEE Trans. Fuzzy Syst. 29(3), 664–673 (2021)
Song, S., Park, J.H., Zhang, B., Song, X.: Event-based adaptive fuzzy fixed-time secure control for nonlinear CPSs against unknown false data injection and backlash-like hysteresis. IEEE Trans. Fuzzy Syst. https://doi.org/10.1109/TFUZZ.2021.3052095
Ren, P., Wang, F., Zhu, R.: Adaptive fixed-time fuzzy control of uncertain nonlinear quantized systems. Int. J. Fuzzy. Syst. 23(3), 794–803 (2021)
Gao, F., Wu, Y., Huang, J., Liu, Y.: Output feedback stabilization within prescribed finite time of asymmetric time-varying constrained nonholonomic systems. Int J Robust and Nonlinear Control 31(2), 427–446 (2021)
Gao, F., Huang, J., Zhu, X., Wu, Y.: Output feedback stabilization via nonlinear mapping for time-varying constrained nonholonomic systems in prescribed finite time. Information Sciences 550, 297–312 (2021)
Gao, F., Zhu, C., Huang, J., Wu, Y.: Global fixed-time output feedback stabilization of perturbed planar nonlinear systems. IEEE Transactions on Circuits and Systems II: Express Briefs 68(2), 707–711 (2020)
Wang, X., Jiang, K., Zhang, G., Niu, B.: Event-triggered-based adaptive decentralized asymptotic tracking control scheme for a class of nonlinear pure-feedback interconnected systems. Nonlinear Dyn. 104, 3881–3859 (2021)
Yang, W., Pan, Y., Liang, H.: Event-triggered adaptive fixed-time nn control for constrained nonstrict-feedback nonlinear systems with prescribed performance. Neurocomputing 422, 332–344 (2021)
Li, M., Li, S., Ahn, C.K., Xiang, Z.: Adaptive fuzzy event-triggered command-filtered control for nonlinear time-delay systems. IEEE Trans. Fuzzy Syst. 30(4), 1025–1035 (2021)
Cao, L., Zhou, Q., Dong, G., Li, H.: Observer-based adaptive event-triggered control for nonstrict-feedback nonlinear systems with output constraint and actuator failures. IEEE Trans. Syst. Man Cybernet. Syst. 51(3), 1380–1391 (2019)
Wang, N., Ahn, C.K.: Coordinated trajectory tracking control of a marine aerial-surface heterogeneous system. IEEE/ASME Transactions on Mechatronics 26(6), 3198–3210 (2021)
Wang, N., Gao, Y., Zhang, X.: Data-driven performance-prescribed reinforcement learning control of an unmanned surface vehicle. IEEE Transactions on Neural Networks and Learning Systems 32(12), 5456–5467 (2021)
Wang, N., Zhang, Y., Ahn, C.K., Xu, Q.: Autonomous pilot of unmanned surface vehicles: Bridging path planning and tracking. IEEE Trans. Veh. Technol. 71(3), 2358–2374 (2021)
Podlubny, I.: Fractional Differential Equations. Academic, New York, NY, USA (1998)
Jin, X.: Adaptive fixed-time control for MIMO nonlinear systems with asymmetric output constraints using universal barrier functions. IEEE Trans. Automat. Control 64(7), 3046–3053 (2018)
Qian, C., Lin, W.: Non-lipschitz continuous stabilizers for nonlinear systems with uncontrollable unstable linearization. Systems and Control Lett. 42(3), 185–200 (2001)
Zhu, Z., Xia, Y., Fu, M.: Attitude stabilization of rigid spacecraft with finite-time convergence. Int. J. Robust & Nonlinear Control 21(6), 686–702 (2011)
Hardy, G.H., Littlewood, J.E., Polya, G.: Inequalities. Cambridge Univ. Press, London, U.K. (1952)
Li, Y., Tong, S.: Adaptive neural networks prescribed performance control design for switched interconnected uncertain nonlinear systems. IEEE Trans Neural Networks and Learning Syst. 29(7), 3059–3068 (2017)
Wang, H., Karimi, H.R., Liu, P.X., Yang, H.: Adaptive neural control of nonlinear systems with unknown control directions and input dead-zone. IEEE Trans. Syst. Man Cybernet. Syst. 48(11), 1897–1907 (2017)
Xing, L., Wen, C., Liu, Z., Su, H., Cai, J.: Event-triggered adaptive control for a class of uncertain nonlinear systems. IEEE Trans. Automat. Control 62(4), 2071–2076 (2016)
Ba, D., Li, Y., Tong, S.: Fixed-time adaptive neural tracking control for a class of uncertain nonstrict nonlinear systems. Neurocomputing 363(21), 273–280 (2019)
Shi, X., Zhou, Z., Zhou, D., Li, R.: Event-triggered fixed-time adaptive trajectory tracking for a class of uncertain nonlinear systems with input saturation. IEEE Transactions on Circuits and Systems II: Express Briefs 68(3), 983–987 (2020)
Ge, S.S., Wang, C.: Uncertain chaotic system control via adaptive neural design. Int. J. Bifur. Chaos 12(05), 1097–1109 (2002)
Askari, M.R., Shahrokhi, M., Talkhoncheh, M.K., Moradvandi, A.: Observer-based adaptive fuzzy controller for uncertain non-strict state-delayed nonlinear systems subject to input and output constraints. J Franklin Institute 357(12), 7483–7514 (2020)
Acknowledgements
This work was supported in part by the National Natural Science Foundation of China under Grant 61976081, 62173159, in part by the Natural Science Fund for Excellent Young Scholars of Henan Province under Grant 202300410127, in part by the Natural Science Fund for Young Scholars of Henan Province under Grant 222300420151, and in part by Key Scientific Research Projects of Higher Education Institutions in Henan Province under Grant 22A413001.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Song, X., Sun, P., Song, S. et al. Event-Triggered Fuzzy Adaptive Fixed-Time Output-Feedback Control for Nonlinear Systems With Multiple Objective Constraints. Int. J. Fuzzy Syst. 25, 275–288 (2023). https://doi.org/10.1007/s40815-022-01304-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-022-01304-0