
Abstract
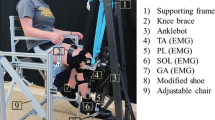
The human ankle has a critical role in locomotion and estimating its impedance is essential for human gait rehabilitation. The ankle is the first major joint that regulates the contact forces between the human body and the environment, absorbing shocks during the stance, and providing propulsion during walking. Its impedance varies with the level of the muscle activation. Hence, characterizing the complex relation between the ankle impedance and the lower leg’s muscle activation levels may improve our understanding of the neuromuscular characteristics of the ankle. Most ankle–foot prostheses do not have a degree of freedom in the transverse plane, which can cause high amounts of shear stress to be applied to the socket and can lead to secondary injuries. Quantifying the ankle impedance in the transverse plane can guide the design for a variable impedance ankle–foot prosthesis that can significantly reduce the shear stress on the socket. This paper presents the results of applying artificial neural networks (ANN) to learn and estimate the relation between the ankle impedance in the transverse plane under non-load bearing condition using electromyography signals (EMG) from the lower leg muscles. The Anklebot was used to apply pseudorandom perturbations to the human ankle in the transverse plane while the other degrees of freedom (DOF) in the sagittal and frontal planes were constrained. The mechanical impedance of the ankle was estimated using a previously proposed stochastic identification method that describes the ankle impedance as a function of the applied disturbances torques and the ankle motion output. The ankle impedance with relaxed muscles and with the lower leg’s muscle activations at 10 and 20% of the maximum voluntary contraction were estimated. The proposed ANN effectively predicts the ankle impedance within 85% accuracy (±5 Nm/rad absolute) for nine out of ten subjects given the root-mean-squared (rms) of the EMG signals. The main contribution of this paper is to quantify the relationship between lower leg muscle EMG signals and the ankle impedance in the transverse plane to pave the way towards designing and controlling this degree of freedom in a future ankle–foot prosthesis.












Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Basmajian, J.V.: Muscles alive, their functions revealed by electromyography, 4th edn. Williams & Wilkins, Baltimore (1979)
Dallali, H., Knop, L., Castelino, L., Ficanha, E., Rastgaar, M.: Estimating the multivariable human ankle impedance in dorsi-plantarflexion and inversion-eversion directions using EMG signals and artificial neural networks. Int. J. Intell. Robotics Appl. 1, 19–31 (2017)
Di Giulio, I., Maganaris, C.N., Baltzopoulos, V., Loram, I.D.: The proprioceptive and agonist roles of gastrocnemius, soleus and tibialis anterior muscles in maintaining human upright posture. J. Physiol. 587, 2399–2416 (2009)
Ficanha, E.M., Rastgaar, M.: Stochastic estimation of human ankle mechanical impedance in lateral/medial direction. In: ASME Dynamic Systems and Control Conference (DSCC), San Antonio (2014)
Ficanha, E.M., Rastgaar, M., Kaufman, K.R.: Ankle mechanics during sidestep cutting implicates need for 2-degree of freedom powered ankle-foot prosthesis. J. Rehabil. Res. Dev. 52, 97–112 (2015a)
Ficanha, E.M., Ribeiro, G.A., Rastgaar, M.: Mechanical impedance of the non-loaded lower leg with relaxed muscles in the transverse plane. Front. Bioeng. Biotechnol. 3, 198 (2015b)
Funahashi, K.-I.: On the approximate realization of continuous mappings by neural networks. Neural Netw. 2, 183–192 (1989)
Glaister, B.C., Bernatz, G.C., Klute, G.K., Orendurff, M.S.: Video task analysis of turning during activities of daily living. Gait Posture 25, 289–294 (2007a)
Glaister, B.C., Schoen, J.A., Orendurff, M.S., Klute, G.K.: Mechanical behavior of the human ankle in the transverse plane while turning. IEEE Trans. Neural Syst. Rehabil. Eng. 15, 552–559 (2007b)
Glaister, B.C., Orendurff, M.S., Schoen, J.A., Bernatz, G.C., Klute, G.K.: Ground reaction forces and impulses during a transient turning maneuver. J. Biomech. 41, 3090–3093 (2008)
Gopura, R.A.R.C., Bandara, D.S.V., Gunasekara, J.M.P., Jayawardane, T.S.S.: Recent trends in EMG-based control methods for assistive robots. In: Electrodiagnosis in New Frontiers of Clinical Research, pp. 237–268 (2013)
Karsoliya, S.: Approximating number of hidden layer neurons in multiple hidden layer BPNN architecture. Int. J. Eng. Trends Technol. 3, 714–717 (2012)
Kearney, R.E., Hunter, I.W.: System identification of human joint dynamics. Crit. Rev. Biomed. Eng. 18, 55–87 (1990)
Kim, H.K., Kang, B., Kim, B., Park, S.: Estimation of multijoint stiffness using electromyogram and artificial neural network. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 39, 972–980 (2009)
Lee, H., Ho, P., Rastgaar, M.A., Krebs, H.I., Hogan, N.: Multivariable static ankle mechanical impedance with relaxed muscles. J. Biomech. 44, 1901–1908 (2011)
Lee, H., Ho, P., Rastgaar, M., Krebs, H.I., Hogan, N.: Multivariable static ankle mechanical impedance with active muscles. IEEE Trans. Neural Syst. Rehabil. Eng. 22, 44–52 (2014a)
Lee, H., Krebs, H.I., Hogan, N.: Multivariable dynamic ankle mechanical impedance with relaxed muscles. IEEE Trans. Neural Syst. Rehabil. Eng. 22, 1104–1114 (2014b)
Lee, H., Krebs, H.I., Hogan, N.: Multivariable dynamic ankle mechanical impedance with active muscles. IEEE Trans. Neural Syst. Rehabil. Eng. 22, 971–981 (2014c)
Lester, W.T., Gonzalez, R.V., Fernandez, B., Barr, R.E.: A neural network approach to electromyographic signal processing for a motor control task. J. Dyn. Syst. Meas. Control 119, 335–337 (1997)
Ljung, L.: System identification. Wiley, New York (1999)
Marquardt, D.W.: An algorithm for least-squares estimation of nonlinear parameters. J. Soc. Ind. Appl. Math. 11, 431–441 (1963)
Olson, N.M., Klute, G.K.: Design of a transtibial prosthesis with active transverse plane control. J. Med. Dev. 9(4) (2015). doi:10.1115/1.4031072
Osu, R., Hiroaki, G.: Multijoint muscle regulation mechanisms examined by measured human arm stiffness and EMG signals. J. Neurophysiol. 81, 1458–1468 (1999)
Pew, C., Klute, G.K.: Design of lower limb prosthesis transverse plane adaptor with variable stiffness. J. Med. Dev. 9(3) (2015). doi:10.1115/1.4030505
Pew, C., Klute, G.K.: Pilot testing of a variable stiffness transverse plane adapter for lower limb amputees. Gait Posture 51, 104–108 (2017)
Pulliam, C.L., Lambrecht, J.M., Kirsch, R.F.: Electromyogram-based neural network control of transhumeral prostheses. J. Rehabil. Res. Dev. 48, 739 (2011)
Rastgaar, M., Ho, P., Lee, H., Krebs, H.I., Hogan, N.: Stochastic estimation of multi-variable human ankle mechanical impedance. In: ASME Dynamic Systems and Control Conference, Hollywood (2009)
Rastgaar, M., Ho, P., Lee, H., Krebs, H.I., Hogan, N.: Stochastic estimation of the multi-variable mechanical impedance of the human ankle with active muscles. In: ASME Dynamic Systems and Control Conference, Boston (2010)
Rastgaar, M., Lee, H., Ficanha, E.M., Ho, P., Krebs, H.I., Hogan, N.: Multi-directional dynamic mechanical impedance of the human ankle; a key to anthropomorphism in lower extremity assistive robots. In: Neuro-Robotics: From Brain Machine Interfaces to Rehabilitation Robotics, pp. 85–103. Springer, New York (2014)
Schöllhorn, W.I.: Applications of artificial neural nets in clinical biomechanics. Clin. Biomech. 19, 876–898 (2004)
Su, P.F., Gard, S.A., Lipschutz, R.D., Kuiken, T.A.: The effects of increased prosthetic ankle motions on the gait of persons with bilateral transtibial amputations. Am. J. Phys. Med. Rehabil. 89, 34–47 (2010)
Taylor, M.J., Dabnichki, P., Strike, S.C.: A three-dimensional biomechanical comparison between turning strategies during the stance phase of walking. Hum. Mov. Sci. 24, 558–573 (2005)
Wang, L., Buchanan, T.S.: Prediction of joint moments using a neural network model of muscle activations from EMG signals. IEEE Trans. Neural Syst. Rehabil. Eng. 10, 30–37 (2002)
Acknowledgements
This material is based upon work supported by the National Science Foundation under CAREER Grant no. 1350154.
Author information
Authors and Affiliations
Corresponding author
Appendix: Subjects data
Appendix: Subjects data
The biometric data of the ten participants in the experiments are given in Table 1.
Rights and permissions
About this article

Cite this article
Dallali, H., Knop, L., Castelino, L. et al. Using lower extremity muscle activity to obtain human ankle impedance in the external–internal direction. Int J Intell Robot Appl 2, 29–42 (2018). https://doi.org/10.1007/s41315-017-0033-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41315-017-0033-7