
Abstract
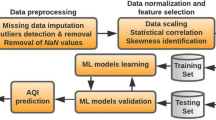
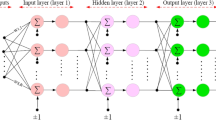
The detection and treatment of increasing air pollution due to technological developments represent some of the most important challenges facing the world today. Indeed, there has been a significant increase in levels of environmental pollution in recent years. The aim of the work presented herein is to design an intelligent predictor for the concentrations of air pollutants over the next 2 days based on deep learning techniques using a recurrent neural network (RNN). The best structure for its operation is then determined using a particle swarm optimization (PSO) algorithm. The new predictor based on intelligent computation relying on unsupervised learning, i.e., long short-term memory (LSTM) and optimization (i.e., PSO), is called the smart air quality prediction model (SAQPM). The main goal is to predict six the concentrations of six types of air pollution, viz. PM2.5 particulate matter, PM10, particulate matter, nitrogen dioxide (NO2), carbon monoxide (CO), ozone (O3), and sulfur dioxide (SO2). SAQPM consists of four stages. The first stage involves data collection from multiple stations (35 in this case). The second stage involves preprocessing of the data, including (a) separation of each station with an independent focus, (b) handle missing values, and (c) normalization of the dataset to the range of (0, 1) using the MinMaxScalar method. The third stage relates to building the predictor based on the LSTM method by identifying the best structure and parameter values (weight, bias, number of hidden layers, number of nodes in each hidden layer, and activation function) for the network using the functional PSO algorithm to achieve a goal. Thereafter, the dataset is split into training and testing parts based on the ten cross-validation principle. The training dataset is then used to build the predictor. In the fourth stage, evaluation results for each station are obtained by reading the concentration of each pollutant each hour for at most 30 days then taking the average of the symmetric mean absolute percentage error (SMAPE) for 25 days only.






Similar content being viewed by others

References
Ali SH (2012) A novel tool (FP-KC) for handle the three main dimensions reduction and association rule mining. In: 2012 6th international conference on sciences of electronics, technologies of information and telecommunications (SETIT), Sousse, IEEE, pp 951–961. https://doi.org/10.1109/SETIT.2012.6482042
Al-Janabi S, Alkaim AF (2019) A nifty collaborative analysis to predicting a novel tool (DRFLLS) for missing values estimation. Soft Comput. https://doi.org/10.1007/s00500-019-03972-x
Al-Janabi S, Alwan E (2017) Soft mathematical system to solve black box problem through development the FARB based on hyperbolic and polynomial functions. In: 2017 10th international conference on developments in eSystems engineering (DeSE), IEEE, pp 37–42. https://doi.org/10.1109/dese.2017.23
Al-Janabi S, Mahdi MA (2019) Evaluation prediction techniques to achievement an optimal biomedical analysis. Int J Grid Util Comput 10(5):512–527
Al-Janabi S, Rawat S, Patel A, Al-Shourbaji I (2015) Design and evaluation of a hybrid system for detection and prediction of faults in electrical transformers. Int J Electr Power Energy Syst 67:324–335. https://doi.org/10.1016/j.ijepes.2014.12.005
Al-Janabi S, Al-Shourbaj I, Salman MA (2018) Assessing the suitability of soft computing approaches for forest fires prediction. Appl Comput Inform 14(2):214–224. https://doi.org/10.1016/j.aci.2017.09.006
Alkaim AF, Al-Janabi S (2020) Multi objectives optimization to gas flaring reduction from oil production. In: Farhaoui Y (ed) Big data and networks technologies. BDNT 2019. Lecture notes in networks and systems, vol 81. Springer, Cham. https://doi.org/10.1007/978-3-030-23672-4_10
Aunan K, Hansen MH, Liu Z, Wang S (2019) The hidden hazard of household air pollution in rural China. Environ Sci Policy 93:27–33. https://doi.org/10.1016/J.ENVSCI.2018.12.004
Basavaraju S, Gaj S, Sur A (2019) Object memorability prediction using deep learning: location and size bias. J Vis Commun Image Represent 59:117–127. https://doi.org/10.1016/J.JVCIR.2019.01.008
Bianchi FM, Maiorino E, Kampffmeyer MC et al (2017) An overview and comparative analysis of recurrent neural networks for short term load forecasting. arXiv:1705.04378
Buyya R, Calheiros RN, Vahid Dastjerdi A et al (2016) Big data principles and paradigms, pp 1–468. https://doi.org/10.1016/C2015-0-04136-3
Chien J-T, Chien J-T (2019) Deep neural network. Source Sep Mach Learn. https://doi.org/10.1016/B978-0-12-804566-4.00019-X
Das HS, Roy P (2019) A deep dive into deep learning techniques for solving spoken language identification problems. Intell Speech Signal Process. https://doi.org/10.1016/B978-0-12-818130-0.00005-2
Ghoneim OA, Doreswamy, Manjunatha BR (2017) Forecasting of ozone concentration in smart city using deep learning. In: 2017 international conference on advances in computing, communications and informatics (ICACCI 2017), IEEE, pp 1320–1326. https://doi.org/10.1109/ICACCI.2017.8126024
Hu M, Wang H, Wang X et al (2019) Video facial emotion recognition based on local enhanced motion history image and CNN-CTSLSTM networks. J Vis Commun Image Represent 59:176–185. https://doi.org/10.1016/J.JVCIR.2018.12.039
Inácio F, Macharet D, Chaimowicz L (2019) PSO-based strategy for the segregation of heterogeneous robotic swarms. J Comput Sci 31:86–94. https://doi.org/10.1016/J.JOCS.2018.12.008
Li X, Peng L, Hu Y et al (2016) Deep learning architecture for air quality predictions. Environ Sci Pollut Res 23:22408–22417. https://doi.org/10.1007/s11356-016-7812-9
Li X, Peng L, Yao X et al (2017) Long short-term memory neural network for air pollutant concentration predictions: method development and evaluation. J Environ Pollut 231:997–1004. https://doi.org/10.1016/j.envpol.2017.08.114
Li H, Wang J, Li R, Lu H (2019) Novel analysis–forecast system based on multi-objective optimization for air quality index. J Clean Prod 208:1365–1383. https://doi.org/10.1016/j.jclepro.2018.10.129
Liu S, Wang Y, Yang X et al (2019) Deep learning in medical ultrasound analysis: a review. Engineering. https://doi.org/10.1016/J.ENG.2018.11.020
Matos J, Faria RPV, Nogueira IBR et al (2019) Optimization strategies for chiral separation by true moving bed chromatography using Particles Swarm Optimization (PSO) and new Parallel PSO variant. Comput Chem Eng 123:344–356. https://doi.org/10.1016/JCOMPCHEMENG.2019.01.020
Ong BT, Sugiura K, Zettsu K (2015) Dynamically pre-trained deep recurrent neural networks using environmental monitoring data for predicting PM2.5. Neural Comput Appl 27(6):1553–1566. https://doi.org/10.1007/s00521-015-1955-3
Popoola OAM, Carruthers D, Lad C et al (2018) Use of networks of low-cost air quality sensors to quantify air quality in urban settings. Atmos Environ 194:58–70. https://doi.org/10.1016/j.atmosenv.2018.09.030
Shang Z, Deng T, He J, Duan X (2019) A novel model for hourly PM2.5 concentration prediction based on CART and EELM. J Sci Total Environ 651:3043–3052. https://doi.org/10.1016/j.scitotenv.2018.10.193
Tebrean B, Crisan S, Muresan C, Crisan TE (2017) Low cost command and control system for automated infusion devices. In: Vlad S., Roman N. (eds) International conference on advancements of medicine and health care through technology; 12th - 15th October 2016, Cluj-Napoca, Romania. IFMBE Proceedings, vol 59. Springer, Cham.https://doi.org/10.1007/978-3-319-52875-5_18
Wen C, Liu S, Yao X, Peng L, Li X, Hu Y, Chi T (2019) A novel spatiotemporal convolutional long short-term neural network for air pollution prediction. J Sci Total Environ 654:1091–1099. https://doi.org/10.1016/j.scitotenv.2018.11.086
Wu L, Li N, Yang Y (2018) Prediction of air quality indicators for the Beijing–Tianjin–Hebei region. J Clean Prod 196:682–687. https://doi.org/10.1016/j.jclepro.2018.06.068
Zhou B-Z, Liu X-F, Cai G-P et al (2019) Motion prediction of an uncontrolled space target. J Adv Space Res 63:496–511. https://doi.org/10.1016/J.ASR.2018.09.025
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors.
Additional information
Communicated by V. Loia.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Item | Description |
|---|---|
DLSTM | Developed long short-term memory |
LSTM | Long short-term memory |
PSO | Particle swarm optimization |
SMAPE | Symmetric mean absolute percentage error |
PM2.5 | Particulate matter with diameter less than 2.5 μm |
PM10 | Particulate matter with diameter less than 10 μm |
O3 | Ozone, the unstable triatomic form of oxygen |
SOx | Sulfur oxides |
CO | Carbon monoxide |
NOx | Nitrogen oxides |
\( \odot \) | Elementwise or Hadamard product |
⊗ | Outer product |
\( \sigma \) | Sigmoid function |
at | Input activation |
it | Input gate |
ft | Forget gate |
ot | Output gate |
Statet | Internal state |
Outt | Output |
W | The weights of the input |
U | The weights of recurrent connections |
\( V_{i}^{t} \): | Velocity of particle i in swarm in dimension j and frequency t |
\( X_{i}^{t} \) | Location of particle i in swarm in dimension j and frequency t |
\( c_{1} \) | Acceleration factor related to Pbest |
\( c_{2} \) | Acceleration factor related to gbest |
\( r_{1}^{t} \), \( r_{2}^{t} \): | Random number between 0 and 1 |
t | Number of occurrences specified by type of problem |
\( G_{{{\text{best}},i}}^{t} \) | gbest position of swarm |
\( P_{{{\text{best}},i}}^{t} \) | pbest position of particle |
Rights and permissions
About this article

Cite this article
Al-Janabi, S., Mohammad, M. & Al-Sultan, A. A new method for prediction of air pollution based on intelligent computation. Soft Comput 24, 661–680 (2020). https://doi.org/10.1007/s00500-019-04495-1
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00500-019-04495-1