
Abstract
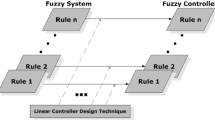
Adaptive control with multiple models can further improve the adaptation ability of controllers for the plant with wide-range uncertain parameters. Fuzzy modeling and control are introduced into the multiple-model adaptive control in this paper, which facilitates the intelligent behavior of a plant facing with uncertainty. Within the combination of fuzzy sets of state variables, the corresponding combined kernel functions of support vector machine are utilized to describe the unknown nonlinear dynamics. The coefficients of kernel functions are learned online through adaptive laws. The multiple identification models and indirect adaptive controllers are assigned to the plant through fuzzy inferences. The stability of adaptive law corresponding to the fuzzy identification model and the synthetic control input through fuzzy fusion has been proved for the proposed fuzzy multiple-model adaptive control (FMMAC). The simulation results demonstrate that the proposed FMMAC can achieve favorable control performance for a class of nonlinear systems.











Similar content being viewed by others

References
Han Z, Narendra KS (2012) New concepts in adaptive control using multiple models. IEEE Trans Autom Control 57(1):78–89
Narendra KS, Han Z (2011) The changing face of adaptive control: the use of multiple models. Annu Rev Control 35(1):1–12
Feng G (2006) A survey on analysis and design of model-based fuzzy control systems. IEEE Trans Fuzzy Syst 14(5):676–697
Wang LX (1993) Stable adaptive fuzzy control of nonlinear systems. IEEE Trans Fuzzy Syst 1(2):1063–6706
Wang LX (1996) Stable adaptive fuzzy controllers with application to inverted pendulum tracking. IEEE Trans Syst Man Cybern B Cybern 26(5):677–691
Xu JX, Liu C, Hang CC (1994) Combined adaptive and fuzzy control using multiple models. In: Proceedings of IEEE world congress on computational intelligence and the third IEEE conference on fuzzy systems, pp 22–29
Al-Olimat KS, Ghandakly AA (2002) Multiple model reference adaptive control algorithm using on-line fuzzy logic adjustment and its application to robotic manipulators. In: Proceedings of the 37th industry applications annual meeting, pp 1463–1466
Zheng H, Zhu KY (2004) A fuzzy controller-based multiple-model adaptive control system for blood pressure control. In: Proceedings of the 8th control, automation, robotics and vision conference, pp 1353–1358
Kamalasadan S, Ghandakly AA, Al-Olimat KS (2004) A fuzzy multiple reference model adaptive control scheme for flexible link robotic manipulator. In: Proceedings of 2004 IEEE international conference on computational intelligence for measurement systems and applications, pp 162–67
Ji ZC, Zhu RJ, Shen YX (2005) Fuzzy multiple reference models adaptive control and simulation study. In: Proceedings of 2005 international conference on machine learning and cybernetics, pp 2747–2752
Sadati N, Ghadami R (2006) Adaptive fuzzy sliding mode control using multiple models approach. In: Proceedings of 2006 IEEE international conference on engineering of intelligent systems, pp 1–6
Kamalasadan S, Ghandakly AA (2007) Multiple fuzzy reference model adaptive controller design for pitch-rate tracking. IEEE Trans Instrum Meas 56(5):1797–1808
Sadati N, Dumont GA, Mahdavian H (2010) Robust multiple model adaptive control using fuzzy fusion. In: Proceedings of the 42nd southeastern symposium on system theory (SSST), pp 19–24
Ye B, Zhu CZ, Cao YJ (2007) Adaptive extended fuzzy basis function network. Neural Comput Appl 16(2):197–206
Zhai JY, Fei SM, Mo XH (2008) Multiple models switching control based on recurrent neural networks. Nerual Compu Appl 17(4):365–371
Xu Y, Wang L, Zhong P (2012) A rough margin-based v-twin support vector machine. Nerual Compu Appl 21(6):1307–1317
Wang Z, He X, Gao D, Xue X (2011) An efficient Kernel-based matrixized least squares support vector machine. Nerual Compu Appl. doi:10.1007/s00521-011-0677-4
Slotine JE, Li W (1991) Applied nonlinear control. Prentice Hall, Englewood Cliffs
Acknowledgments
The author would like to wholeheartedly thank Professor Kumpati S. Narendra and Dr. Zhuo Han for their encouragement for this study. The heated discussion about this work they have provided is greatly appreciated. It is financially supported by the Fundamental Research Funds for the Central Universities of China (Grant No. 2009JBM006) and partially by the National Natural Science Foundation of China (Grant No. 61074138).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Zhou, Y. Fuzzy indirect adaptive control using SVM-based multiple models for a class of nonlinear systems. Neural Comput & Applic 22, 825–833 (2013). https://doi.org/10.1007/s00521-012-1313-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-012-1313-7