
Abstract
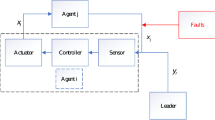
This paper studies how to preserve connectivity for nonlinear time-delayed multiagent systems using event-based mechanism. By using the idea of divide-and-conquer, we divide the distributed controller into five parts to deal with different requirements of the time-delayed multiagent systems, such as eliminating the negative effects of time delays, preserving connectivity, learning the unknown dynamics and achieving consensus. To reduce the communication times among the agents, a centralized event-based protocol is introduced and an event-triggered function is devised to control the frequency of the communication without Zeno behavior. The technique of \(\sigma \)-functions is used to exclude the singularity of the established distributed controller. In the simulation example, the results demonstrate the validity of our developed methodology.








Similar content being viewed by others


References
Butt MA, Akram M (2015) A novel fuzzy decision-making system for CPU scheduling algorithm. Neural Comput Appl. doi:10.1007/s00521-015-1987-8
Cao Y, Yu W, Ren W, Chen G (2013) An overview of recent progress in the study of distributed multi-agent coordination. IEEE Trans Ind Inf 9(1):427–438
Chen C, Wen GX, Liu YJ, Wang FY (2014) Adaptive consensus control for a class of nonlinear multiagent time-delay systems using neural networks. IEEE Trans Neural Netw Learn Syst 25(6):1217–1226
Cheng L, Hou ZG, Tan M, Lin Y, Zhang W (2010) Neural-network-based adaptive leader-following control for multiagent systems with uncertainties. IEEE Trans Neural Netw 21(8):1351–1358
De La Torre G, Yucelen T, Johnson E (2014) Bounded hybrid connectivity control of networked multiagent systems. IEEE Trans Autom Control 59(9):2480–2485
Dong Y, Huang J (2014) Leader-following connectivity preservation rendezvous of multiple double integrator systems based on position measurement only. IEEE Trans Autom Control 59(9):2598–2603
Gao W, Jiang ZP (2016) Nonlinear and adaptive suboptimal control of connected vehicles: a global adaptive dynamic programming approach. J Intell Robot Syst. doi:10.1007/s10846-016-0395-3
Gao W, Jiang ZP, Ozbay K (2016) Data-driven adaptive optimal control of connected vehicles. IEEE Trans Intell Transp Syst. doi:10.1109/TITS.2016.2597279
Ge S, Hong F, Lee T (2004) Adaptive neural control of nonlinear time-delay systems with unknown virtual control coefficients. IEEE Trans Syst Man Cybern Part B Cybern 34(1):499–516
He W, Ge S (2016) Cooperative control of a nonuniform gantry crane with constrained tension. Automatica 66(4):146–154
Heemels W, Johansson KH, Tabuada P (2012) An introduction to event-triggered and self-triggered control. In: Proceedings of the conference on decision and control, Maui, Hawaii, USA, pp 3270–3285
Hou ZG, Cheng L, Tan M (2009) Decentralized robust adaptive control for the multiagent system consensus problem using neural networks. IEEE Trans Syst Man Cybern Part B Cybern 39(3):636–647
Jadbabaie A, Lin J, Morse AS (2003) Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans Autom Control 48(6):988–1001
Jiang ZP, Liu TF (2015) A survey of recent results in quantized and event-based nonlinear control. Int J Autom Comput 12(5):455–466
Liang H, Zhang H, Wang Z, Wang J (2014) Consensus robust output regulation of discrete-time linear multi-agent systems. IEEE/CAA J Autom Sin 1(2):204–209
Liu D, Wang D, Li H (2014) Decentralized stabilization for a class of continuous-time nonlinear interconnected systems using online learning optimal control approach. IEEE Trans Neural Netw Learn Syst 25(2):418–428
Liu T, Jiang ZP (2015) Event-based control of nonlinear systems with partial state and output feedback. Automatica 53:10–22
Luo X, Feng L, Yan J, Guan X (2015) Dynamic coverage with wireless sensor and actor networks in underwater environment. IEEE/CAA J Autom Sin 2(3):274–281
Ma H, Liu D, Wang D (2015) Distributed control for nonlinear time-delayed multi-agent systems with connectivity preservation using neural networks. In: Proceedings of the 22nd international conference on neural information processing, Istanbul, Turkey, pp 34–42
Ma H, Liu D, Wang D, Tan F, Li C (2015) Centralized and decentralized event-triggered control for group consensus with fixed topology in continuous time. Neurocomputing 161:267–276
Ma H, Liu D, Wang D, Luo B (2016) Bipartite output consensus in networked multi-agent systems of high-order power integrators with signed digraph and input noises. Int J Syst Sci 47(13):3116–3131
Ma H, Wang Z, Wang D, Liu D, Yan P, Wei Q (2016) Neural-network-based distributed adaptive robust control for a class of nonlinear multiagent systems with time delays and external noises. IEEE Trans Syst Man Cybern Syst 46(6):750–758
Mu C, Ni Z, Sun C, He H (2016) Data-driven tracking control with adaptive dynamic programming for a class of continuous-time nonlinear systems. IEEE Trans Cybern. doi:10.1109/TCYB.2016.2548941
Olfati-Saber R, Murray RM (2004) Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans Autom Control 49(9):1520–1533
Reynolds CW (1987) Flocks, herds, and schools: a distributed behavioral model. Comput Graph 21(4):25–34
Schneider MO, Rosa JLG (2009) Application and development of biologically plausible neural networks in a multiagent artificial life system. Neural Comput Appl 18(1):65–75
Seyboth GS, Dimarogonas DV, Johansson KH (2013) Event-based broadcasting for multi-agent average consensus. Automatica 49(1):245–252
Shen J, Tan H, Wang J, Wang J, Lee S (2015) A novel routing protocol providing good transmission reliability in underwater sensor networks. J Internet Technol 16(1):171–178
Su H, Wang X, Chen G (2010) Rendezvous of multiple mobile agents with preserved network connectivity. Syst Control Lett 59(5):313–322
Tabuada P (2007) Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans Autom Control 52(9):1680–1685
Vicsek T, Czirók A, Ben-Jacob E, Cohen I, Shochet O (1995) Novel type of phase transition in a system of self-driven particles. Phys Rev Lett 75(6):1226–1229
Wang D, Liu D, Zhao D, Huang Y, Zhang D (2013) A neural-network-based iterative GDHP approach for solving a class of nonlinear optimal control problems with control constraints. Neural Comput Appl 22(2):219–227
Wang D, Liu D, Li H, Ma H, Li C (2016) A neural-network-based online optimal control approach for nonlinear robust decentralized stabilization. Soft Comput 20(2):707–716
Wang D, Liu D, Mu C, Ma H (2016) Decentralized guaranteed cost control of interconnected systems with uncertainties: a learning-based optimal control strategy. Neurocomputing. doi:10.1016/j.neucom.2016.06.020
Wang D, Ma H, Liu D (2016) Distributed control algorithm for bipartite consensus of the nonlinear time-delayed multi-agent systems with neural networks. Neurocomputing 174:928–936
Wang D, Mu C, He H, Liu D (2016) Event-driven adaptive robust control of nonlinear systems with uncertainties through ndp strategy. IEEE Trans Syst Man Cybern Syst. doi:10.1109/TSMC.2016.2592682
Wang D, Mu C, Liu D (2016) Data-driven nonlinear near-optimal regulation based on iterative neural dynamic programming. Acta Autom Sin (accepted)
Werfel J, Petersen K, Nagpal R (2014) Designing collective behavior in a termite-inspired robot construction team. Science 343(6172):754–758
Xie S, Wang Y (2014) Construction of tree network with limited delivery latency in homogeneous wireless sensor networks. Wirel Pers Commun 78(1):231–246
Yu H, Antsaklis P (2012) Formation control of multi-agent systems with connectivity preservation by using both event-driven and time-driven communication. In: Proceedings of the IEEE conference on decision control, Maui, Hawaii, USA, pp 7218–7223
Zavlanos M, Tanner H, Jadbabaie A, Pappas G (2009) Hybrid control for connectivity preserving flocking. IEEE Trans Autom Control 54(12):2869–2875
Zhu W, Jiang ZP (2015) Event-based leader-following consensus of multi-agent systems with input time delay. IEEE Trans Autom Control 60(5):1362–1367
Acknowledgments
This work was supported in part by the National Natural Science Foundation of China under Grants 61233001, 61273140, 61304086, 61533017, 61503379 and U1501251, in part by China Scholarship Council under the State Scholarship Fund, in part by Beijing Natural Science Foundation under Grant 4162065 and in part by the Early Career Development Award of SKLMCCS.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Ma, H., Wang, D. Connectivity preserved nonlinear time-delayed multiagent systems using neural networks and event-based mechanism. Neural Comput & Applic 29, 361–369 (2018). https://doi.org/10.1007/s00521-016-2614-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-016-2614-z