
Abstract
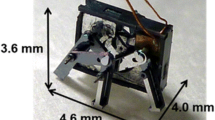
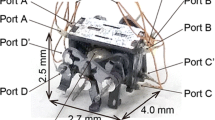
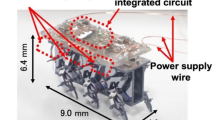
This article presents the micro-electro-mechanical systems (MEMS) microrobot which demonstrates locomotion controlled by hardware neural networks (HNN). The size of the microrobot fabricated by the MEMS technology is 4 × 4 × 3.5 mm. The frame of the robot is made of silicon wafer, and it is equipped with a rotary-type actuator, a link mechanism, and six legs. The rotary-type actuator generates rotational movement by applying an electrical current to artificial muscle wires. The locomotion of the microrobot is obtained by the rotation of the rotary-type actuator. As in a living organism, the HNN realized robot control without using any software programs, A/D converters, or additional driving circuits. A central pattern generator (CPG) model was implemented as an HNN system to emulate the locomotion pattern. The MEMS microrobot emulated the locomotion method and the neural networks of an insect with the rotary-type actuator, the link mechanism, and the HNN. The microrobot performed forward and backward locomotion, and also changed direction by inputting an external trigger pulse. The locomotion speed was 0.325 mm/s and the step width was 1.3 mm.
Similar content being viewed by others
References
Edqvist E, Snis N, Mohr RC, et al (2009) Evaluation of building technology for mass producible millimeter-sized robots using flexible printed circuit boards. J Micromech Microeng 19:11
Suematsu H, Kobayashi K, Ishii R, et al (2009) MEMS type micro robot with artificial inteligence system. Proceedings of the International Conference on Electronics Packaging, pp 975–978
Saito K, Okazaki K, Kawakami T, et al (2010) Pulse-type hardware CPG model for MEMS type micro robot. AVLSIWS 2010, p 201
Matsuoka K (1987) Mechanism of frequency and pattern control in the neural rhythm generators. Biol Cybern 56:345–353
Ikemoto T, Nagashino H, Kinouchi Y, et al (1997) Oscillatory mode transitions in a four coupled neural oscillator model (in Japanese). International Symposium on Nonlinear Theory and its Applications, pp 561–564
Nakada K, Asai T, Amemiya Y (2003) An analog CMOS central pattern generator for interlimb coordination in quadruped locomotion. IEEE Trans Neural Networks 14:1356–1365
Homma D (2003) Metal artificial muscle “biometal fiber” (in Japanese). JRSJ 21:22–24
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was presented in part at the 16th International Symposium on Artificial Life and Robotics, Oita, Japan, January 27–29, 2
About this article
Cite this article
Okazaki, K., Ogiwara, T., Yang, D. et al. Development of a pulse control-type MEMS microrobot with a hardware neural network. Artif Life Robotics 16, 229–233 (2011). https://doi.org/10.1007/s10015-011-0925-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-011-0925-9