
Abstract
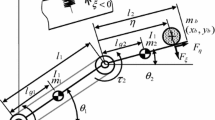
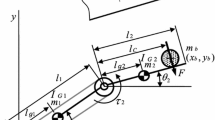
In this article, equations of motion of a manipulator are derived in consideration of the characteristics of DC servomotors, and a performance criterion for saving energy is defined in consideration of energy consumption of the driving source. When the manipulator is operated in a vertical plane, the system is highly non-linear due to gravity, and an analytical solution cannot be found. By considering for catching the object that moves parabolic, trajectories for saving energy are calculated by iterative dynamic programming method. And, the dynamic characteristics of two-link system controlled based on the trajectory for saving energy are analyzed theoretically. When the object moves parabolic, measurement method for the force of collision between link and object is examined by experiment.








Similar content being viewed by others

References
Tachiya H, Urano K et al (1996) Characteristics evaluation and comparisons of robotic mechanisms. J JSME 62(598):2395–2402 (2nd report, Evaluation of robotic mechanisms subjected to impact load) (in Japanese)
Kumon M, Adachi N (2002) Path following control based on dynamic parametrization for manipulator with impact. J JSME 68(665):132–138 (in Japanese)
Izumi T (2000) Path planning for saving energy of a manipulator in PTP motion. J Robot Soc Jpn 18:972–978 (in Japanese)
Sato O, Sato A, Takahashi N, Yokomichi M (2012) Analysis of manipulator in consideration of impact absorption between link and object. Artif Life Robot 17:211–215
Sato A, Sato O, Takahashi N, Yokomichi M (2015) Experimental analysis of the two-link-manipulator in consideration of the relative motion between link and object. Artif Life Robot 20:173–177
Sato O, Sato A, Takahashi N, Yokomichi M (2016) Analysis of the two-link manipulator in consideration of the horizontal motion about object. Artif Life Robot 21:43–48
Tsuji T, Tanaka Y (2008) Bio-mimetic impedance control of robotic manipulator for dynamic contact tasks. Robot Auton Syst 56:306–316
Ren Y, Liu Y, Jin M, Liu H (2016) Biomimetic object impedance control for dual-arm cooperative 7-DOF manipulators. Robot Auton Syst 75:273–287
Author information
Authors and Affiliations
Corresponding author
About this article

Cite this article
Sato, A., Sato, O., Takahashi, N. et al. Analysis of manipulator in consideration of impact absorption between link and projected object. Artif Life Robotics 22, 113–117 (2017). https://doi.org/10.1007/s10015-016-0313-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-016-0313-6