
Abstract
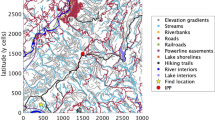
In Wilderness Search and Rescue (WiSAR), the incident commander (IC) creates a probability distribution map of the likely location of the missing person. This map is important because it guides the IC in allocating search resources and coordinating efforts, but it often depends almost exclusively on the missing person profile, prior experience, and subjective judgment. We propose a Bayesian model that uses publicly available terrain features data to help model lost-person behaviors. This approach enables domain experts to encode uncertainty in their prior estimations and also makes it possible to incorporate human behavior data collected in the form of posterior distributions, which are used to build a first-order Markov transition matrix for generating a temporal, posterior predictive probability distribution map. The map can work as a base to be augmented by search and rescue workers to incorporate additional information. Using a Bayesian χ 2 test for goodness-of-fit, we show that the model fits a synthetic dataset well. This model also serves as a foundation for a larger framework that allows for easy expansion to incorporate additional factors such as season and weather conditions that affect the lost-person’s behaviors.
Similar content being viewed by others

References
Akaike H (1974) A new look at the statistical model identification. IEEE Trans Autom Control 19(6):716–723. ISSN 0018-9286
Bourgault F, Furukawa T, Durrant-Whyte HF (2003) Optimal search for a lost target in a Bayesian world. In: Yuta S, Asama H, Thrun S, Prassler E, Tsubouchi T (eds) FSR. Springer tracts in advanced robotics, vol 24. Springer, Berlin, pp 209–222. ISBN:978-3-540-32801-8
Bourgault F, Chokshi A, Compbell M (2008) Human-computer augmented nodes for scalable mobile sensor networks. In: Proceedings of the SMC DHMS 2008
Ferguson D GIS for wilderness search and rescue. In: ESRI federal user conference, February 2008
Gelman A, Carlin JB, Stern HS, Rubin DB (2004) Bayesian data analysis, 2nd edn. Chapman & Hall/CRC, London
Goodrich MA, Morse BS, Gerhardt D, Cooper JL, Quigley M, Adams JA, Humphrey C (2008) Supporting wilderness search and rescue using a camera-equipped mini UAV. J. Field Robotics 25(1–2):89–110
Gorman B, Thurau C, Bauckhage C, Humphrys M (2006) Bayesian imitation of human behavior in interactive computer games. In: ICPR ’06: proceedings of the 18th international conference on pattern recognition. IEEE Comput Soc, Washington, pp 1244–1247. ISBN:0-7695-2521-0
Heth CD, Cornell EH (1998) Characteristics of travel by persons lost in Albertan wilderness areas. J Environ Psychol 18(3):223–235
Hill KA (1998) The psychology of lost. In: Lost person behavior, National SAR Secretariat, Ottawa, Canada
Johnson VE, (2004) A Bayesian χ 2 test for goodness-of-fit. Ann Stat 32(6):2361–2384
Koester RJ Lost Person Behavior: A search and rescue guide on where to look—for land, air and water. dbS Productions LLC, August 2008
Lin L, Goodrich MA UAV intelligent path planning for wilderness search and rescue. In: IEEE international conference on intelligent robots and systems, St. Louis, Missouri, USA, October 2009
Oliver N, Rosario B, Pentland A (2000) A Bayesian computer vision system for modeling human interactions. IEEE Trans Pattern Anal Mach Intell 22(8):831–843. ISSN 0162-8828. doi: 10.1007/s10588-010-9066-2
Sanborn A, Griffiths T (2008) Markov chain Monte Carlo with people. In: Platt J, Koller D, Singer Y, Roweis S (eds) Advances in neural information processing systems 20. MIT Press, Cambridge, pp 1265–1272
Schwarz G (1978) Estimating the dimension of a model. Ann Stat 6(2):461–464. ISSN 00905364
Setnicka TJ, Andrasko K, (1980) Wilderness search and rescue. Appalachian Mountain Club
Soylemez E, Usul N Utility of GIS in search and rescue operations. In: ESRI users group conference, September 2006
Spiegelhalter DJ, Best NG, Carlin BP, vd Linde A, (2002) Bayesian measures of model complexity and fit. J R Stat Soc Ser B Stat Methodol 64(4):583–639. ISSN 13697412
Syrotuck WG (2000a) Analysis of lost person behavior. Barkleigh Productions, Mechanicsburg
Syrotuck WG (2000b) An introduction to land search probabilities and calculations. Barkleigh Productions, Mechanicsburg
Tenenbaum JB (1999) Bayesian modeling of human concept learning. In: Proceedings of the 1998 conference on Advances in neural information processing systems II. MIT Press, Cambridge, pp 59–65. ISBN:0-262-11245-0
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lin, L., Goodrich, M.A. A Bayesian approach to modeling lost person behaviors based on terrain features in Wilderness Search and Rescue. Comput Math Organ Theory 16, 300–323 (2010). https://doi.org/10.1007/s10588-010-9066-2
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10588-010-9066-2