
Abstract
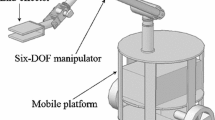
Dynamics and control of mobile manipulators is obviously a more challenging problem compared to fixed-base robots. Including a suspension system for these mobile platforms increases their maneuverability, but considerably adds to their complexity. In this paper, a suspended wheeled mobile platform with two 6-DOF Puma-type manipulators is used to manipulate an object along a given path. To apply a model-based control algorithm, it is required to have an explicit dynamics model for such highly nonlinear system. This model should be as concise as possible to include fewer mathematical calculations for online computations. Therefore in this paper, a detailed set of dynamics equations for a multiple arm wheeled mobile platform equipped with an effective suspension system is presented. The method is based on the concept of Direct Path Method (DPM), which is extended here for such challenging type of robots. The obtained dynamics model is then verified with a dynamical analysis study using software ADAMS. Then, Natural Orthogonal Complement Method is used to include the non-holonomic constraint of the wheeled platform in a more concise dynamics model. Next, an impedance control law is applied for cooperative manipulation of an object by the two manipulators. The obtained results for a suspended wheeled platform equipped with two 6-DOF Puma-type manipulators reveal a successful performance for moving an object along a mixed circular-straight path, even in the presence of unexpected disturbing forces, system/end-effector flexibility and impacts due to contact with an obstacle.
Similar content being viewed by others


References
Moosavian, S., Ali, A., Kalantari, A., Semsarilar, H., Aboosaeedan, E., Mihankhah, E.: ResQuake: a tele-operative rescue robot. ASME J. Mech. Des. 131(081005), 1–11 (2009)
Dalvand, M., Moghadam, M.: Stair climber smart mobile robot (MSRox). Auton. Robots 20, 3–14 (2006)
Huang, H.-C., Tsai, C.-C.: Adaptive robust control of an omnidirectional mobile platform for autonomous service robots in polar coordinates. J. Intell. Robot. Syst. 51, 439–460 (2008)
Alipour, K., Moosavian, S., Ali, A., Bahramzadeh, Y.: Dynamics of wheeled mobile robots with flexible suspension: analytical modeling and verification. Int. J. Robot. Autom. 23(4), 242–250 (2008)
Watanabe, K., Izumi, K., Maki, J., Fujimoto, K.: A fuzzy behavior-based control for mobile robots using adaptive fusion units. J. Intell. Robot. Syst. 42, 27–49 (2005)
Liu, A.-Y., Wu, C.-J.: A discrete method for time-optimal motion planning of a class of mobile robots. J. Intell. Robot. Syst. 32, 75–92 (2001)
Eghtesad, M., Necsulescu, D.S.: Experimental study of the dynamic based feedback linearization of an autonomous wheeled ground vehicle. J. Robot. Auton. Syst. 47, 47–63 (2004)
Klancar, G., Matko, D., Blažic, S.: Wheeled mobile robots control in a linear platoon. J. Intell. Robot. Syst. 54, 709–731 (2009)
Dierks, T., Jagannathan, S.: Asymptotic adaptive neural network tracking control of nonholonomic mobile robot formations. J. Intell. Robot. Syst. 56, 153–176 (2009)
Yu, H., Wang, Y.: Coordinated collective motion of groups of autonomous mobile robots with directed interconnected topology. J. Intell. Robot. Syst. 53, 87–98 (2008)
Yu, Q., Chen, I.-M.: A general approach to the dynamics of nonholonomic mobile manipulator systems. ASME J. Dyn. Syst. Meas. Control 124, 512–521 (2002)
Saha, S.K., Angeles, J.: Dynamics of nonholonomic mechanical systems using a natural orthogonal complement. ASME J. Appl. Mech. 58, 238–244 (1991)
Saha, S.K., Angeles, J.: Kinematics and dynamics of a three-wheeled 2-DOF AGV. In: Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 1572–1577. Piscataway, USA (1989)
Meghdari, M., Durali, M., Naderi, D.: Investigating dynamic interaction between the one D.O.F. manipulator and vehicle of a mobile manipulator. J. Intell. Robot. Syst. 28, 277–290 (2000)
Moosavian, S., Ali, A., Papadopoulos, E.: explicit dynamics of free flyers with multiple manipulator via SPACEMAPLE. J. Adv. Robotic. 18(2), 223–244 (2004)
Wang, D., Xu, G.: Full-state tracking and internal dynamics of non-holonomic wheeled mobile robots. IEEE/ASME Trans. Mechatron. 8, 203–214 (2003)
Yang, T.T., Liu, Z.Y., Chen, H., Pei, R.: The research on robust tracking control of constrained wheeled mobile robots. In: Proc. of the IEEE Int. Conf. on Machine Learning and Cybernetics, pp. 1356–1361 (2005)
Yamashita, A., Arai, T., Ota, J., Asama, H.: Motion planning of multiple mobile robots for cooperative manipulation and transportation. IEEE Trans. Robot. Autom. 19, 223–237 (2003)
Kohji, M., Yoshiki, M.: Characteristics of a manipulation system for an autonomous mobile herd. SICE Annual Conference, pp. 2302–2307 (2004)
Bayro-Corrochano, E., Machucho-Cadena, R.: Object manipulation using fuzzy logic and geometric algebra. In: Proc. of the IEEE Int. Conf. on Pattern Recognition, pp. 1120–1123 (2006)
Shibata, M., Hirai, S.: Soft object manipulation by simultaneous control of motion and deformation. In: Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 2460–2465 (2006)
Taipalus, T., Kosuge, K.: Development of service robot for fetching objects in home environment. In: Int. Sym. on Computational Intelligence in Robotics and Automation, pp. 451–456 (2005)
Moosavian, S., Ali, A.: Papadopoulos, E.: Multiple impedance control for object manipulation. In: Proc. of the IEEE/RJS Int. Conf. on Intelligent Robots and Systems, Victoria, B.C, Canada (1998)
Moosavian, S., Ali, A., Rastegari, R., Papadopoulos, E.: Multiple impedance control for space free-flying robots. AIAA J. Guid. Control Dyn. 28(5), 939–947 (2005)
Meirovitch, L.: Methods of Analytical Dynamics. McGraw-Hill, New York (1970)
Armstrong, B., Khatib, O., Burdick, J.: The explicit dynamic model and inertial parameters of the PUMA 560 arm. In: Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 510–518 (1986)
Dubowsky, S., Vance, E.E.: Planning mobile manipulator motions considering vehicle dynamic stability constraints manipulators. In: Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 1271–1276 (1989)
Huang, Q., Tanie, K., Sugano, S.: Stability compensation of a mobile manipulator by manipulator motion: feasibility and planning. J. Adv. Robotic. 13(1), 25–40 (1999)
Huang, Q., Tanie, K., Sugano, S.: Coordinated motion planning for a mobile manipulator considering stability and task constraints. Int. J. Rob. Res. 19(8), 732–742 (2000)
Abo-Shanab, R.F., Sepehri, N.: Effect of base compliance on the dynamic stability of mobile manipulators. Robotica 20, 607–613 (2002)
Sugano, S., Huang, Q., Kato, I.: Stability criteria in controlling mobile robotic systems. In: Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 832–838 (1993)
Goswami, A.: Postural stability of biped robots and the Foot Rotation Indicator (FRI) Point. Int. J. Rob. Res. 18, 523–533 (1999)
Vukobratovic, M., Borovac, B.: Zero moment point: thirty five years of its life. Int. J. Human. Robot. 1, 157–173 (2004)
Ghasempoor, A., Sepehri, N.: A measure of stability for mobile manipulators with application to heavy-duty hydraulic machines. ASME J. Dyn. Syst. Meas. Control 120, 360–370 (1998)
Papadopoulos, E., Rey, D.A.: The force-angle measure of tip-over stability margin for mobile manipulators. J. Vehicle Syst. Dyn. 33, 29–48 (2000)
Moosavian, S., Ali, A., Alipour, K.: On the dynamic tip-over stability of wheeled mobile manipulators. Int. J. Robot. Autom. 22(4), 322–328 (2007)
Moosavian, S., Ali, A., Ashtiani, H.R.: Cooperation of robotic manipulators using non-model-based multiple impedance control. J. Indust. Robot. 35(6), 549–558 (2008)
De Fazio, T.L., Seltzer, D.S., Whitney, D.E.: The instrumented remote centre compliance. J. Indust. Robot. 11(4), 238–242 (1984)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Eslamy, M., Moosavian, S.A.A. Dynamics and Cooperative Object Manipulation Control of Suspended Mobile Manipulators. J Intell Robot Syst 60, 181–199 (2010). https://doi.org/10.1007/s10846-010-9413-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10846-010-9413-z