
Abstract
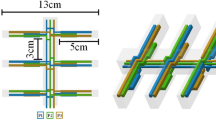
This paper presents design and modelling of a flex-rigid soft robot for flipping locomotion. The proposed robot is made into a strip shape and consists of three rigid limbs connected by two active flexible hinges. Its flipping locomotion is achieved by active folding and developing of the hinges. To validate its locomotion ability, we build a state-space model to simulate its dynamics, which is compared with the experimental data. The results show that the proposed flex-rigid robot can perform flipping locomotion with average velocity of 59mm/s in simulation and 60mm/s in experiment, and the model can predict its movement effectively.
Similar content being viewed by others

References
Ilievski, F., Mazzeo, A.D., Shepherd, R.F., Chen, X., Whitesides, G.M.: Soft robotics for chemists. Angewandte Chemie - International Edition 50(8), 1890–1895 (2011)
Sanan, S.: Soft inflatable robots for safe physical human interaction. Carnegie Mellon University 3575511, 240 (2013)
Rodrigue, H., Wang, W., Han, M.-W., Kim, T.J.Y., Ahn, S.-H.: An overview of shape memory alloy-coupled actuators and robots. Soft Robot. 4(1), 3–15 (2017)
Shian, S., Bertoldi, K., Clarke, D.: Dielectric elastomer based grippers for soft robotics. Adv. Mater. (Deerfield Beach Fla.) 27, 6814–6819 (2015)
Hughes, J., Culha, U., Giardina, F., Guenther, F., Rosendo, A., Iida, F.: Soft manipulators and grippers: a review. Front. Robot. AI 3, 69 (2016)
Katzschmann, R.K., DelPreto, J., MacCurdy, R., Daniela, R.: Exploration of underwater life with an acoustically controlled soft robotic fish, vol. 3 (2018)
Su, K.Y., Gul, J.Z., Choi, H.K.: A biomimetic jumping locomotion of functionally graded frog soft robot. In: 2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence, URAI 2017, pp. 675–676 (2017)
Lin, H.T., Leisk, G.G., Trimmer, B.: GoQBot: a caterpillar-inspired soft-bodied rolling robot. Bioinspiration and Biomimetics 6(2), 026007 (2011)
Nemiroski, A., Shevchenko, Y.Y., Stokes, A.A., Unal, B., Ainla, A., Albert, S., Compton, G., MacDonald, E., Schwab, Y., Zellhofer, C., Whitesides, G.M.: Arthrobots. Soft Robot. soro.2016.0043, 183–190 (2017)
Tolley, M.T., Shepherd, R.F., Mosadegh, B., Galloway, K.C., Wehner, M., Karpelson, M., Wood, R.J., Whitesides, G.M.: A resilient, untethered soft robot. Soft Robot. 1(3), 213–223 (2014)
Steltz, E., Mozeika, A., Rodenberg, N., Brown, E., Jaeger, H.M.: JSEL: Jamming skin enabled locomotion. In: 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2009, pp. 5672–5677 (2009)
Fei, Y., Xu, H.: Modeling and motion control of a soft robot. IEEE Trans. Ind. Electron. 64(2), 1737–1742 (2017)
Loepfe, M., Schumacher, C.M., Lustenberger, U.B., Stark, W.J.: An untethered, jumping Roly-Poly soft robot driven by combustion. Soft Robot. 2(1), 33–41 (2015)
Nishikawa, S., Arai, Y., Niiyama, R., Kuniyoshi, Y.: Coordinated Use of Structure-Integrated Bistable Actuation Modules for Agile Locomotion. IEEE Robot. Autom. Lett. 3(2), 1018–1024 (2018)
Alexander, R.M.N.: Principles of animal locomotion. Princeton University Press, Princeton (2003)
Tolley, M.T., Shepherd, R.F., Karpelson, M., Bartlett, N.W., Galloway, K.C., Wehner, M., Nunes, R., Whitesides, G.M., Wood, R.J.: An untethered jumping soft robot. In: IEEE International Conference on Intelligent Robots and Systems, pp. 561–566 (2014)
Masuda, Y., Ishikawa, M.: Development of a deformation-driven rolling robot with a soft outer shell. In: 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), pp. 1651–1656 (2017)
Marchese, A.D., Onal, C.D., Rus, D.: Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators. Soft Robot. 1(1), 75–87 (2014)
Luo, M., Agheli, M., Onal, C.D.: Theoretical modeling and experimental analysis of a Pressure-Operated soft robotic snake. Soft Robot. 1(2), 136–146 (2014)
Onal, C.D., Rus, D.: A modular approach to soft robots. In: 2012 4th IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), pp. 1038–1045 (2012)
Wikipedia contributors. Vertebrate — {Wikipedia}{,} The Free Encyclopedia (2018)
Al-Fahaam, H., Davis, S., Nefti-Meziani, S.: The design and mathematical modelling of novel extensor bending pneumatic artificial muscles (EBPAMs) for soft exoskeletons. Robot. Auton. Syst. 99, 63–74 (2018)
Wang, W., Ahn, S.-H.: Shape memory alloy-based soft gripper with variable stiffness for compliant and effective grasping. Soft Robot. 4(4), 379–389 (2017)
Bar-Cohen, Y., Zhang, Q.: Electroactive polymer actuators and sensors. MRS Bull. 33(03), 173–181 (2008)
Andrikopoulos, G., Nikolakopoulos, G., Stamatis, M.: A survey on applications of pneumatic artificial muscles. In: 2011 19th Mediterranean Conference on Control And Automation, MED 2011, pp. 1439–1446 (2011)
Eiter, T., Mannila, H.: Computing Discrete frėchet Distance. Technical report, Information Systems Department Technical University of Vienna (1994)
Bouc, R: Forced vibration of mechanical systems with hysteresis. In: Proceedings Con/ Nonlinear Oscillation, Prague, Czechoslovakia (1967)
Acknowledgements
This work was supported by the National Natural Science Foundation of China (Grant No. 51475300, 51875335) and Joint fund of the Ministry of Education (No.18GFA-ZZ07-171).
Funding
This work was funded by the National Natural Science Foundation of China (Grant No. 51475300, 51875335) and Joint fund of the Ministry of Education (No.18GFA-ZZ07-171).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interests
The authors declare that they have no conflict of interest.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Wang, J., Fei, Y. Design and Modelling of Flex-Rigid Soft Robot for Flipping Locomotion. J Intell Robot Syst 95, 379–388 (2019). https://doi.org/10.1007/s10846-018-0957-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10846-018-0957-7