
Abstract
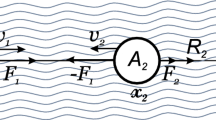
Locomotion of a mechanical system consisting of two rigid bodies, a main body and a tail, is considered. The system moves in a resistive fluid and is controlled by angular oscillations of the tail relative to the main body. The resistance force acting upon each body is assumed to be a quadratic function of its velocity. Under certain assumptions, a nonlinear equation is derived that describes the progressive motion of the system as a whole.
The average velocity of this motion depending on the angular oscillations of the tail is estimated. The optimal control problem for the time history of these oscillations that maximizes the average velocity of the progressive motion is formulated and solved. Explicit expressions for the maximum average velocity and the corresponding optimal angular motion of the tail are obtained.
The results correlate well with observations of swimming and can be applied to swimming robotic systems.
Similar content being viewed by others

References
Gray, J.: Animal Locomotion. Norton, New York (1968)
Lighthill, J.: Mathematical Biofluiddynamies. SIAM, Philadelphia (1975)
Blake, R.W.: Fish Locomotion. Cambridge University Press, Cambridge (1983)
Hirose, S.: Biologically Inspired Robots: Snake-like Locomotors and Manipulators. Oxford University Press, Oxford (1993)
Chernousko, F.L.: Controllable motions of a two-link mechanism along a horizontal plane. J. Appl. Math. Mech. 65, 565–577 (2001)
Chernousko, F.L.: Snake-like locomotions of multilink systems. In: Schiehlen, W., Valasek, M. (eds.) Virtual Nonlinear Multibody Systems, pp. 343–362. Kluwer, Dordrecht (2003)
Chernousko, F.L.: Modelling of snake-like locomotion. Appl. Math. Comput. 164, 415–434 (2005)
Kelly, S.D., Mason, R.J., Anhalt, C.T., Murray, R.M., Burdick, J.W.: Modelling and experimental investigation of carangiform locomotion for control. In: Proceedings of the American Control Conference, Philadelphia, pp. 1271–1276 (1998)
Terada, Y., Yamamoto, I.: Development of oscillating fin propulsion system and its application to ships and artificial fish. Mitsubishi Heavy Ind. Tech. Review 36, 84–88 (1999)
Mason, R., Burdick, J.: Construction and modelling of a carangiform robotic fish. In: Korcke, P., Trevelyan, J. (eds.) Experimental Robotics VI. Lecture Notes in Control and Information Sciences, vol. 250, pp. 235–242. Springer, Berlin (2000)
Morgansen, K.A., Duindam, V., Mason, R.J., Burdick, J.W., Murray, R.M.: Nonlinear control methods for planar carangiform robot fish locomotion. In: Proceedings of the 2001 IEEE International Conference on Robotics and Automation, pp. 427–434 (2001)
Colgate, J.E., Lynch, K.M.: Mechanics and control of swimming: a review. IEEE J. Ocean. Eng. 29, 660–673 (2004)
http://en.wikipedia.org/wiki/RoboTuna # References (2010)
Bogoliubov, N.N., Mitropolsky, Y.A.: Asymptotic Methods in the Theory of Nonlinear Oscillations. Gordon and Breach, New York (1961)
Pontryagin, L.S., Boltyanskii, V.G., Gamkrelidze, R.V., Mishchenko, E.F.: The Mathematical Theory of Optimal Processes. Gordon and Breach, New York (1986)
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by the Russian Foundation for Basic Research (Project 08-01-00411).
Rights and permissions
About this article
Cite this article
Chernousko, F.L. Optimal Motion of a Two-Body System in a Resistive Medium. J Optim Theory Appl 147, 278–297 (2010). https://doi.org/10.1007/s10957-010-9722-1
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10957-010-9722-1