
Abstract
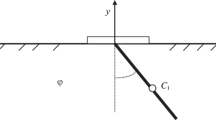
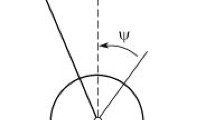
A time-optimal control problem for a pendulum-like system is considered. The system describes the dynamics of an inertial object under the action of a bounded control force and an external force which is periodic in coordinate. The terminal set consists of points on the abscissa axis of the phase plane, and the distance between two neighboring points is equal to the period of the external force. In the general case, the solution can be obtained only numerically. An estimate is found for the amplitude of the control for which the time-optimal feedback control has the simplest structure: the number of switchings is not greater than one for any initial conditions. For the estimated interval of the control constraints, we analyze the feedback control pattern.






Similar content being viewed by others

References
Pontryagin, L.S., Boltyanskii, V.G., Gamkrelidze, R.V., Mishchenko, E.F.: The Mathematical Theory of Optimal Processes. Gordon and Breach, New York (1986)
Friedland, B., Sarachik, P.: Indifference regions in optimum attitude control. IEEE Trans. Autom. Control 9(2), 180–181 (1964)
Filimonov, Yu.M.: On an optimal control problem for a mathematical pendulum. Differ. Uravn. 1(8), 1007–1015 (1965)
Lee, E.B., Markus, L.: Foundations of Optimal Control Theory. Wiley, New York (1967)
Garcia Almuzara, J.L., Flügge-Lotz, I.: Minimum time control of a nonlinear system. J. Differ. Equ. 4(1), 12–39 (1968)
Beletskii, V.V.: Optimal transfer of an artificial earth satellite to a gravitationally stable position. Cosm. Res. 9, 337 (1971)
Chernousko, F.L., Reshmin, S.A.: Time-optimal swing-up feedback control of a pendulum. Nonlinear Dyn. 47(1–3), 65–73 (2007)
Reshmin, S.A., Chernousko, F.L.: Time-optimal feedback control of a nonlinear pendulum. J. Comput. Syst. Sci. Int. 46(1), 9–18 (2007)
Mason, P., Broucke, M.E., Piccoli, B.: Time optimal swing-up of the planar pendulum. IEEE Trans. Autom. Control 53(8), 1876–1886 (2008)
Anchev, A.A.: Equilibrium attitude transitions of a three-rotor gyrostat in a circular orbit. AIAA J. 11, 467–472 (1973)
Reshmin, S.A.: Finding the principal bifurcation value of the maximum control torque in the problem of optimal control synthesis for a pendulum. J. Comput. Syst. Sci. Int. 47, 163–178 (2008)
Acknowledgements
This work was supported by the Presidential Program for the State Support of Leading Scientific Schools (Project No. NSh-369.2012.1) and the Russian Foundation for Basic Research Pproject Nos. 11-01-00378, 11-08-00435, and 11-01-00513).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Reshmin, S.A., Chernousko, F.L. Properties of the Time-Optimal Feedback Control for a Pendulum-Like System. J Optim Theory Appl 163, 230–252 (2014). https://doi.org/10.1007/s10957-013-0480-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10957-013-0480-8