
Abstract
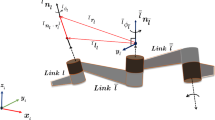
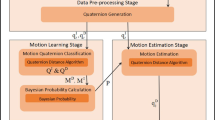
In this paper, we present an algorithm for human motion capture of the real-time motion trajectory of human arms based on wireless inertial 3D motion trackers. It aims to improve the accuracy of inertial motion captures and quickly reconstruct some human movements. To evaluate the performance of the proposed dual quaternion algorithm, we present the prototype design. The wireless inertial measurement system and Kinect device are introduced simultaneously in capturing human motion. The dual quaternion algorithm incorporates features of the quaternion rotation and translation. So the singular points of Euler angles can be avoided. Dual quaternion algorithm and DCM(direction cosine matrix) are used to reconstruct human arm movements respectively. Compared with the computing speed in Matlab, the speed of the dual quaternion is faster than it of DCM. To the end, we propose a 3D ADAMS human robotic model for simulating the motion trajectory using dual quaternion algorithm. The results show that the dual quaternion can achieve capabilities of a positive DCM solving, which completed between body segments rotating and translating the coordinate system transformation. Also it can effectively drive in real-time a human model to animate movement, and provide a good algorithm.









Similar content being viewed by others

References
Bo-shi H, Fu-min C (2005) Research on human body motion capture and motion control. Comput Eng Appl 7(1):60–63
Chen WF, Zhu S, Wan H, Feng J (2013) Dual quaternion based virtual hand interaction modeling. Sci China Inf Sci 56(3):1–11
Esser P, Dawes H, Collett J, Howells K (2009) Inertial sensing of vertical CoM movement. J Biomech 42:1578–1581
Figueredo LFC, Adorno BV, Ishihara JY, Borges GA (2013) Robust kinematic control of manipulator robots using dual quaternion representation. 2013 I.E. International Conference on Robotics and Automation(ICRA). Karlsruhe, Germany, May 6–10, 2013. 1949–1955
Frisoli A, Loconsole C, Bartalucci R, Bergamasco M (2013) A new bounded jerk on-line trajectory planning for mimicking human movements in robot-aided neurorehabilitation. Robot Auton Syst 61:404–415
Guan L (2003) Research on motion generation and control techniques for virtual human. Northwestern Polyteehnieal University 18–23
King K, Yoon SW, Perkins NC (2008) Wireless MEMS inertial sensor system for golf swing dynamics. Sensors Actuators A 141(2):619–630
Kirtley C, Smith R (2001) Application of multimedia to the study of human movement. Multimedia Tools Appl 14:259–268
Ladislav K, Steven C, Carol O et al (2006) Dual quaternions for rigid transformation blending. The University of Dublin, Trinity College, Ireland
Li Q, Young M, Naing V, Donelan JM (2010) Walking speed estimation using a shank-mounted inertial measurement unit. J Biomech 43:1640–1643
Liang C (2011) SINS algorithms based on dual quaternions. Harbin Institute of Technology 26–27
Mingcai Y, Xunnian Y, Guozhao W (2005) Interpolation of unit quaternion curve with high order continuity. J Comput Aided Des Comput 17(3):437–441
Nan Z, Sun S, Wu J, Meng X, Tao G (2013) A real-time micro-sensor motion capture system, vol 334. Springer Berlin, Heidelberg, pp 685–694
Ni Z, Liao Q, Wei S, Li R (2009) Dual four element method for inverse kinematics analysis of spatial 6R manipulator. J Mech Eng 45(11):25–29
Ni Z, Liao Q, Wu X (2013) General 6R robot inverse solution algorithm based on a quaternion matrix and a Groebner base. J Tsinghua Univ (Sci Tech) 53(5):683–687
Perez A, McCarthy JM (2004) Dual quaternion synthesis of constrained robotic systems. J Mech Des ASME 126:425–435
Peruzzi A, Della Croce U, Cereatti A (2011) Estimation of stride length in level walking using an inertial measurement unit attached to the foot: a validation of the zero velocity assumption during stance. J Biomech 44:1991–1994
Pham H-L, Perdereau V, Adorno BV, Fraisse P (2010) Position and orientation control of robot manipulators using dual quaternion feedback. The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (10):658–663.
Rosa-Pujazón A, Barbancho I, Tardón LJ, Barbancho AM (2015) Fast-gesture recognition and classification using Kinect:an application for a virtual reality drumkit. Multimedia Tools Appl 27(7):1–28
Rosa-Pujazón A, Barbancho I, Tardón L, Barbancho A (2015) A virtual reality drumkit simulator system with a Kinect device. Int J Creat Interfaces Comput Graph 6(1):72–86, accepted for publication
Sanna A, Lamberti F, Paravati G, Manuri F (2013) A Kinect-based natural interface for quadrotor control. Entertain Comput 78:48–56
Wang X, Yu C (2013) Unit dual quaternion-based feedback linearization tracking problem for attitude and position dynamics. Syst Control Lett 62:225–233
Wu YX (2005) Strapdown inertial navigation system algorithms based on dual quaternions. IEEE Trans Aerosp Electron Syst 41(1):110–132
Xia L-l, Zhao L, Liu F-m, Hu X-x (2008) Research on attitude updating algorithm based on dual quaternion for attitude and heading reference system. J Syst Simul 20(2):276–280
Xiaoying Z, Lishu W, Cailian Y (2012) The second-order kinematic singularity of orientation in euler parameters representation. Sci Technol Eng 12(3):634–637
Yuan Q, Chen I-M (2013) Human velocity and dynamic behavior tracking method for inertial capture system. Sensors Actuators A Phys 183:123–131
Yuan Q, Chen I-M, Lee SP (2011) 3D localization of human based on kinetic human movement capture. 2011 I.E. International Conference on Robotics and Automation 9–13
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Grant No.51405073). Innovation team project of higher college in Liaoning province (LT2014006).
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
(WMV 10610 kb)
(WMV 1449 kb)
Rights and permissions
About this article

Cite this article
Ji, L., Wang, H., Zheng, T. et al. Motion trajectory of human arms based on the dual quaternion with motion tracker. Multimed Tools Appl 76, 1681–1701 (2017). https://doi.org/10.1007/s11042-015-3099-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11042-015-3099-y