
Abstract
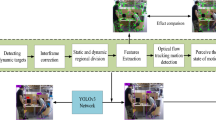
In dynamic scene monocular visual SLAM, it is important to recognize static object imaging features for mapping. The optical flow of noise and the object moving in the same orientations would have the same orientations of static feature for two frames image, that would disturb static feature point recognition. Because the translational motion optical flow orientations method judges with optical flow of single feature point and translational motion orientations, it is not reliable for static feature point recognition. Therefore, a 3D motion segmentation combined for static object imaging features recognition is proposed, which clusters the same optical flow of feature points in 3D motion subspace, including orientations and amplitude of translation and rotation. The simulation results show that the proposed static object imaging features recognition method improves the recognition correct rate and reliability of static features. So, it is effective for static object imaging features recognition in dynamic scene mapping.




Similar content being viewed by others

References
Bideau P, Learned-Miller E (2016) It’s moving! A probabilistic model for causal motion segmentation in moving camera videos[C]. European Conference on Computer Vision, p 433–449.
Chen G, Lerman G (2009) Motion segmentation by scc on the hopkins 155 database[C]. 2009 IEEE 12th International Conference on Computer Vision Workshops (ICCV Workshops). IEEE, p 759–764
Civera J, Grasa OG, Davison AJ, et al (2009) 1-point RANSAC for EKF-based structure from motion[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2009. IROS 2009. IEEE, p 3498–3504
Civera J, Grasa OG, Davison AJ et al (2010) 1-Point RANSAC for extended Kalman filtering: application to real-time structure from motion and visual odometry[J]. J Field Rob 27(5):609–631
Forbes C, Evans M, Hastings N, et al (2011) von Mises Distribution[J]. Statistical Distributions, Fourth Edition, p 191–192.
Kundu A, Krishna KM, Sivaswamy J (2009) Moving object detection by multi-view geometric techniques from a single camera mounted robot[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2009. IROS 2009. IEEE, p 4306–4312
Kundu A, Krishna KM, Jawahar CV (2010) Realtime motion segmentation based multibody visual SLAM[C]. Proceedings of the Seventh Indian Conference on Computer Vision, Graphics and Image Processing. ACM, p 251–258.
Kundu A, Jawahar CV, Krishna KM (2010) Realtime moving object detection from a freely moving monocular camera[C]. 2010 IEEE International Conference on Robotics and Biomimetics (ROBIO). IEEE, p 1635–1640.
Lucas B D, Kanade T (1981) An iterative image registration technique with an application to stereo vision[J].:674–679
Mair E, Hager GD, Burschka D, et al (2010) Adaptive and generic corner detection based on the accelerated segment test[C]. European conference on Computer vision. Springer, Berlin, Heidelberg, p 183–196.
Migliore D, Rigamonti R, Marzorati D, et al (2009) Use a single camera for simultaneous localization and mapping with mobile object tracking in dynamic environments[C]. ICRA Workshop on Safe navigation in open and dynamic environments: Application to autonomous vehicles, p 12–17
Mur-Artal R, Montiel JMM, Tardos JD (2015) ORB-SLAM: a versatile and accurate monocular SLAM system[J]. IEEE Trans Robot 31(5):1147–1163
Namdev R K, Kundu A, Krishna K M, et al (2012) Motion segmentation of multiple objects from a freely moving monocular camera[C]. 2012 IEEE International Conference on Robotics and Automation (ICRA). IEEE, p 4092–4099.
Narayana M, Hanson A, Learned-Miller E (2013) Coherent motion segmentation in moving camera videos using optical flow orientations[C]. 2013 IEEE International Conference on Computer Vision (ICCV). IEEE, p 1577–1584
Nister D (2005) Preemptive RANSAC for live structure and motion estimation [J]. Mach Vis Appl 16(5):321–329
Perera LDL, Wijesoma WS, Adams MD (2004) On multidimensional assignment data association for simultaneous robot localization and mapping[C]. 2004 IEEE International Conference on Robotics and Automation. ICRA'04. IEEE, 2004, 1:860–865
Rodríguez-Canosa GR, Thomas S, Del Cerro J et al (2012) A real-time method to detect and track moving objects (DATMO) from unmanned aerial vehicles (UAVs) using a single camera[J]. Remote Sens 4(4):1090–1111
Rosten E, Drummond T (2006) Machine learning for high-speed corner detection[C]. European conference on computer vision. Springer, Berlin, Heidelberg, p 430–443.
Rosten E, Porter R, Drummond T (2010) Faster and better: a machine learning approach to corner detection[J]. IEEE Trans Pattern Anal Mach Intell 32(1):105–119
Shi J (1994) Good features to track[C]. 1994 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 1994. IEEE, p 593–600
Shi J, Malik J (2000) Normalized cuts and image segmentation[J]. IEEE Trans Pattern Anal Mach Intell 22(8):888–905
Tan W, Liu H, Dong Z, et al (2013) Robust monocular SLAM in dynamic environments[C]. 2013 IEEE International Symposium on. IEEE Mixed and Augmented Reality (ISMAR), p 209–218
Xu W, Li P, Han B (2012) Monocular visual SLAM of unmanned helicopter based on 2-point RANSAC[J]. Robot 34(1):64–71
Yan J, Pollefeys M (2006) A general framework for motion segmentation: Independent, articulated, rigid, non-rigid, degenerate and non-degenerate[C]. European conference on computer vision. Springer, Berlin, Heidelberg, p 94–106.
Yan J, Pollefeys M (2008) A factorization-based approach for articulated nonrigid shape, motion and kinematic chain recovery from video[J]. IEEE Trans Pattern Anal Mach Intell 30(5):865–877
Acknowledgements
This work was supported by Shaanxi Province Key Research and Development program (Program No. 2018GY-184), and supported by the Program for Innovative Science and Research Team of Xi’an Technological University.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Gao, J., Han, B. & Yan, K. Static object imaging features recognition algorithm in dynamic scene mapping. Multimed Tools Appl 78, 33885–33898 (2019). https://doi.org/10.1007/s11042-019-08148-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11042-019-08148-1