
Abstract
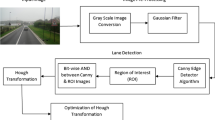
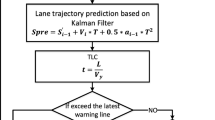
In order to adapt to various complex lane environments, a general fast lane extraction algorithm was proposed. Firstly, according to the mutability of the local gray value and the characteristics of image saliency, the collected road image was preprocessed, and the region of interest was obtained by the proposed double threshold algorithm. Only in the significant region of the road were the image gray value change and image smoothing carried out to solve the problems of consuming too much time and poor noise resistance in lane detection. The lane line edge was then extracted based on the improved Canny operator. When the Otsu threshold was selected, the Kalman filter algorithm was introduced to quickly predict the optimal threshold of the subsequent image sequence in accordance with the characteristics of optimized autoregressive data processing.. Finally, for the straight line fitted by the Hough transform, an effective multi-layer evaluation function was established to realize the online correction of lane lines. Compared with the traditional lane line extraction algorithm, the experimental results show that the proposed algorithm has better accuracy, real-time performance and robustness.












Similar content being viewed by others

Data availability
The data that support the findings of this study are available from the corresponding author upon reasonable request.
References
Babashakoori S, Ezoji M (2019) Average fiber diameter measurement in scanning Electron microscopy images based on Gabor filtering and Hough transform[J]. Measurement 141:364–370. https://doi.org/10.1016/j.measurement.2019.04.051
Du XX, Tan KK (2016) Vision-based approach towards lane line detection and vehicle localization [J]. Mach Vis Appl 27(2):175–191. https://doi.org/10.1007/s00138-015-0735-5
Fu Z, He JF, Cui R et al (2015) Image segmentation with multilevel threshold of Gray-Level & Gradient-Magnitude Entropy Based on genetic algorithm [C]//proceedings of 2015 international conference on artificial intelligence and industrial engineering (AIIE2015). Phuket: Science and Engineering Research Center:554–557. https://doi.org/10.2991/aiie-15.2015.144
Gong SJ, Li GQ, Zhang YJ et al (2019) Application of static gesture segmentation based on an improved canny operator[J]. The Journal of Engineering 2019(15):543–546. https://doi.org/10.1049/joe.2018.9377
Gonzalea CI, Melin P, Castro JR et al (2016) An improved sobel edge detection method based on generalized type-2 fuzzy logic [J]. Soft Comput 20(2):773–784. https://doi.org/10.1007/s00500-014-1541-0
Jiang LF, Xiong HL (2017) Coding-based hough transform for pedestrian detection [C]. Proceedings of 2017 17th IEEE International Conference on Communication Technology (ICCT2017). Sichuan: IEEE 2017:1565–1569. https://doi.org/10.1109/ICCT.2017.8359886
Jiao XY, Yang DG, Jiang K et al (2019) Real-time lane detection and tracking for autonomous vehicle applications [J]. Proceedings of the Institution of Mechanical Engineers 233(9):2301–2311. https://doi.org/10.1177/0954407019866989
Joanna IO (2015) Active contour based optical character recognition for automated scene understanding [J]. Neurocomputing 161(1):65–71. https://doi.org/10.1016/j.neucom.2014.12.089
Joanna IO (2019) Designing transparent and autonomous intelligent vision systems [C]. In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART2019). Czech Republic: Prague 2019:850–856. https://doi.org/10.5220/0007585208500856
Lee C, Moon JH (2018) Robust lane detection and tracking for real-time applications [J]. IEEE Trans Intell Transp Syst 19(12):4043–4048. https://doi.org/10.1109/TITS.2018.2791572
Li L, Liu YH, Wang J et al (2016) Human dynamics based driver model for autonomous car [J]. IET Intell Transp Syst 10(8):545–554. https://doi.org/10.1049/iet-its.2015.0173
Lv C, Cao DP, Zhao YF et al (2018) Analysis of autopilot disengagements occurring during autonomous vehicle testing [J]. IEEE/CAA Journal of Automatica Sinica 5(1):58–68. https://doi.org/10.1109/JAS.2017.7510745
Lyu P, Wei GH, Cui W (2019) Short-range multitarget motion parameter estimation method based on Hough transform[J]. Chin J Electron 28(2):344–348. https://doi.org/10.1049/cje.2019.01.005
Maliheh A, Kamran K, Ardalan A et al (2019) Image segmentation using multilevel thresholding based on modified bird mating optimization [J]. Multimed Tools Appl 78(16):23003–23027. https://doi.org/10.1007/s11042-019-7515-6
Marc JP, Chamberland, Robert A et al (2020) Motion tracking of low-activity fiducial markers using adaptive region of interest with list-mode positron emission tomography[J]. Med Phys 47(8):3402–3414. https://doi.org/10.1016/j.neucom.2020.10.009
Narote SP, Bhujbal PN, Narote AS et al (2018) A review of recent advances in lane detection and departure warning system [J]. Pattern Recogn 73:216–134. https://doi.org/10.1016/j.patcog.2017.08.014
Pare S, Kumar A, Bajaj V et al (2019) A context sensitive multilevel thresholding using swarm based algorithms[J]. IEEE / CAA Journal of Automatica Sinica 6(6):1471–1486. https://doi.org/10.1109/JAS.2017.7510697
Pei SY, Wang SZ, Zhang HH et al (2018) Methods for monitoring and controlling multi-rotor micro-UAVs position and orientation based on LabVIEW [J]. International Journal of Precision Agricultural Aviation 1(1):51–58. https://doi.org/10.33440/j.ijpaa.20180101.0009
Qin Y, Wu J, An W (2017) Laser marking grid image feature extraction based on RANSAC [J]. Computer Engineering & Science 39(08):1495–1501 ( in Chinese)
Ren TW, Liu Y, Ju R et al (2016) How important is location information in saliency detection of natural images [J]. Multimed Tools Appl 75(5):2543–2564. https://doi.org/10.1007/s11042-015-2875-z
Sangeetha D, Deepa P (2019) FPGA implementation of cost-effective robust canny edge detection algorithm [J]. J Real-Time Image Proc 16(4):957–970. https://doi.org/10.1007/s11554-016-0582-2
Wang Q, Wei Z, Wang N et al (2019a) Lane detection algorithm based on projection statistics and hyperbolic fitting [J]. China Mechanical Engineering 30(04):393–399 (in Chinese)
Wang J, Chen L, Huang L et al (2019b) Lane recognition method in weak light condition based on Retinex [J]. Computer and Digital Engineering 47(2):451–456 ( in Chinese)
Wang P, Jia GH, Zhou ZY (2019c) Improved G-K fuzzy clustering segmentation algorithm for rice damaged-spots infested by Rice leaf roller [J]. International Journal of Precision Agricultural Aviation 2(2):62–66
Wei Y, Yang X, Tan D (2018) Research on lane line classification based on Gist-SVM and lane detection and recognition [J]. High Technology Communications 28(Z1):867–873 ( in Chinese)
Xiao X, Che XJ (2016) The recognition algorithm for lane line of urban road based on feature analysis [J]. Computer Aided Drafting, Design and Manufacturing 26(02):18–26 CNKI:SUN:CADD.0.2016-02-004
Xin C, Liu Y (2019) Research on lane recognition algorithm based on probability Hough transform[J]. Bulletin of Surveying and Mapping S2:52–55 (in Chinese)
Xu XB, Luo MZ, Tan ZY et al (2019) Measured accuracy improvement method of velocity and displacement based on adaptive Kalman filter[J]. Sens Rev 39(5):708–715. https://doi.org/10.1108/SR-10-2018-0255
Xuan H, Liu H, Yuan J et al (2017) Robust multi-lane detection algorithm[J]. Computer Science 44(11):305–313 (in Chinese)
Yoo JH, Lee SW, Park SK et al (2017) A robust lane detection method based on vanishing point estimation using the relevance of line segments [J]. IEEE Trans Intell Transp Syst 18(12):3254–3266. https://doi.org/10.1109/TITS.2017.2679222
Yu J, Zhang L, Chen K et al (2019) Long-distance small road obstacles detection based on road vanishing point [J]. Journal of Tongji University (Natural Science) 47(S1):213–216 ( in Chinese)
Zhang T, Xu X, Wang ZC (2018) Spacecraft attitude estimation based on matrix Kalman filter and recursive cubature Kalman filter [J]. Proceed Instit Mech Eng 232(16):3024–3033. https://doi.org/10.1177/0954410017723359
Zhao Z, Zhou L, Zhu Q (2018) Preview distance adaptive optimization for the path tracking control of unmanned vehicle [J]. Journal of Mechanical Engineering 54(24):166–173 ( in Chinese)
Zhou H, Song X, Liu G et al (2020) Comput Eng Design 41(06):1719–1724 ( in Chinese)
Acknowledgments
This work was funded by the National Natural Science Foundation of China (61303006), Top Talents Program for One Case One Discussion of Shandong Province, The Research Award Fund for Outstanding Young Scholars of Shandong Province (Grant No. BS2012ZZ009), National Key Research and Development Program in Shandong Province (2019GNC106127).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Gong, J., Chen, T. & Zhang, Y. Complex lane detection based on dynamic constraint of the double threshold. Multimed Tools Appl 80, 27095–27113 (2021). https://doi.org/10.1007/s11042-021-10978-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11042-021-10978-x