
Abstract
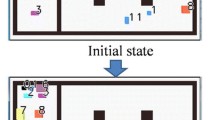
We propose a Task and Motion Planning algorithm for a robot manipulator to rearrange objects in a narrow and highly-dense workspace. In such a workspace, there may not be enough space to rearrange the objects that obstructs the way for a robot manipulator to access a target object. The present work aims to relocate as few objects (so called obstacles) as possible for the robot manipulator to grasp the target object successfully. The proposed algorithm seeks both the sequence of obstacles to be rearranged and the corresponding places to move them. A heuristic search is employed to find a rearrangement sequence and places. Especially, in the proposed algorithm, stacking an object on the top of other objects is allowed, while searching a place to rearrange obstacles. Virtual simulations and real robot experiments show that the proposed algorithm works reasonably for dense real-world environments.










Similar content being viewed by others
References
Blum AL, Furst ML (1995) Fast planning through planning graph analysis. Artif Intell 90:1636–1642
Cambon S, Gravot F, Alami R (2004) A robot task planner that merges symbolic and geometric reasoning. ECAI 16:895–899
Cambon S, Alami R, Gravot F (2009) A hybrid approach to intricate motion, manipulation and task planning. Int J Robot Res 28:104–126
Coles A, Coles A, Fox M, et al (2010) Forward-chaining partial-order planning. AAAI Press, ICAPS’10, pp 42–49
Dogar MR, Srinivasa SS (2012) A planning framework for non-prehensile manipulation under clutter and uncertainty. Auton Robots 33:217–236
Eyerich P, Mattmüller R, Röger G (2009) Using the context-enhanced additive heuristic for temporal and numeric planning. In: ICAPS
Fox M, Long D (2011) Pddl2.1: An extension to pddl for expressing temporal planning domains. CoRR arxiv:1106.4561, http://dblp.uni-trier.de/db/journals/corr/corr1106.html#abs-1106-4561
Gerety C, Cull P (1986) Time complexity of the towers of Hanoi problem. SIGACT News 18:80–87
Han S, Stier N, Bekris K, et al (2017) Efficient, high-quality stack rearrangement. IEEE Robot Autom Lett
Han S, Stiffler N, Bekris K et al (2017) Efficient, high-quality stack rearrangement. IEEE Robot Autom Lett 3:1608–1615
Han SD, Stiffler NM, Krontiris A et al (2018) Complexity results and fast methods for optimal tabletop rearrangement with overhand grasps. Int J Robot Res 37:1775–1795
Havur G, Haspalamutgil K, Palaz C, et al (2013) A case study on the tower of Hanoi challenge: representation, reasoning and execution
Helmert M (2011) The fast downward planning system. CoRR. arXiv:1109.6051
Hoffmann J, Nebel B (2011) The FF planning system: fast plan generation through heuristic search. J Artif Intell Res 14:253–302
Kang M, Kwon Y, Yoon SE (2018) Automated task planning using object arrangement optimization. In: 15th International conference on ubiquitous robots (UR), pp 334–341
Krontiris A, Bekris KE (2015) Dealing with difficult instances of object rearrangement. Roboti Sci Syst
Kuffner JJ, LaValle SM (2000) RRT-connect: an efficient approach to single-query path planning. Proc IEEE Int Conf Robot Autom 2:995–1001
Lee J, Cho Y, Nam C, et al (2019) Efficient obstacle rearrangement for object manipulation tasks in cluttered environments. In: Proc IEEE Int Conf Robot Autom, pp 183–189
Lee J, Nam C, Park J, et al (2021) Tree search-based task and motion planning with prehensile and non-prehensile manipulation for obstacle rearrangement in clutter. In: Proc IEEE Int Conf Robot Autom, pp 8516–8522
Moll M, Kavraki L, Rosell J, et al (2018) Randomized physics-based motion planning for grasping in cluttered and uncertain environments. IEEE Robot Autom Lett pp 712–719
Murali A, Mousavian A, Eppner C, et al (2020) 6-dof grasping for target-driven object manipulation in clutter. In: Proc IEEE Int Conf Robot Autom, pp 6232–6238
Nam C, Cheong SH, Lee J, et al (2021) Fast and resilient manipulation planning for object retrieval in cluttered and confined environments. IEEE Trans Robot
Papallas R, Dogar MR (2020) Non-prehensile manipulation in clutter with human-in-the-loop. In: Proc IEEE Int Conf Robot Autom, pp 6723–6729
Rohmer E, Singh SPN, Freese M (2013) V-rep: A versatile and scalable robot simulation framework. In: 2013 IEEE/RSJ Int Conf Intell Robots Syst pp 1321–1326, https://doi.org/10.1109/IROS.2013.6696520
Simony M, Milzy S, Amendey K, et al (2018) Complex-yolo: An euler-region-proposal for real-time 3D object detection on point clouds. In: Proceedings of the European conference on computer vision (ECCV) workshops
Srivastava S, Fang E, Riano L, et al (2014) Combined task and motion planning through an extensible planner-independent interface layer. In: Proceedings of the IEEE international conference on robotics and automation, pp 639–646
Stilman M, Kuffner J (2008) Planning among movable obstacles with artificial constraints. Int J Robot Res 27:1295–1307
Sucan IA, Moll M, Kavraki LE (2012) The open motion planning library. IEEE Robot Autom Mag 19:72–82
Vega-Brown W, Roy N (2016) Asymptotically optimal planning under piecewise-analytic constraints. In: Workshop on the algorithmic foundations of robotics
Wilfong G (1991) Motion planning in the presence of movable obstacles. Annals of Math Artif Intell pp 131–150
Zhang C, Shah JA (2016) Co-optimizing task and motion planning. In: IEEE/RSJ International conference on intelligent robots and systems, pp 4750–4756
Acknowledgements
This work was supported by the Technology Innovation Program and Industrial Strategic Technology Development Program (10077538, Development of manipulation technologies in social contexts for human-care service robots).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Lee, J., Rakhman, U., Nam, C. et al. High dimensional object rearrangement for a robot manipulation in highly dense configurations. Intel Serv Robotics 15, 649–660 (2022). https://doi.org/10.1007/s11370-022-00444-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11370-022-00444-4