
Abstract
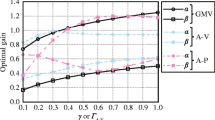
A joint range-velocity closed tracking loop, which is based on tightly coupled range and velocity filter is proposed. When the measured velocity value is adopted in the range tracking loop to modify the velocity and acceleration equations from traditional α-β-γ filter, the tracking loop based on tightly coupled range and velocity filter can not only track the range and the velocity simultaneously, but also improve the range tracking accuracy. The experimental results show that the tracking errors about range thermal noise in the proposed loop is lower than those in the traditional loop over 2.2 dB, when filter parameters satisfy least mean-square error criterion. Moreover, with the increase of the filter parameter, the tracking performance of our schemes are improved accordingly.
Similar content being viewed by others

References
Jain V, Blair W D. Filter design for steady-state tracking of maneuvering targets with LFM waveforms. IEEE Trans Aerosp Electron Syst, 2009, 45: 765–773
Sklansky J. Optimizing the dynamic parameter of a track-while-scan system. Princton, NJ: RCA Laboratories, 1957
Zhou H Y, Taj M. Target detection and tracking with heterogeneous sensors. IEEE J Sel Topic Signal Process, 2008, 2: 503–513
Simpson H R. Performance measures and optimization condition for a third-order sampled-data tracker. IEEE Trans Automat Contr, 1963, 8: 182–183
Whang I H, Cho S J, Choe D G. Range tracking filter using measurements with uncertain delays. In: International Conference on Control, Automation and Systems 2010, KINTEX, Gyeonggi-do. 2133–2137
Hendrick C L. Tracking filter for the mitigation of the ionospheric range bias. IEEE Trans Aerosp Electron Syst, 2008, 44: 339–347
Soares G L, Arnold-Bos A. An interval-based target tracking approach for range-only multistatic radar. IEEE Trans Magnet, 2008, 44: 1350–1353
Leung S W. Radar range tracker using adaptive switching model. IEEE Electron Lett, 1992, 28: 1133–1135
Dirk T, Tarunraj S. Characterizing performance of filters. IEEE Trans Aerosp Electron Syst, 2002, 38: 1072–1087
Sinha A, Kirubarajan T, Bar-Shalom Y. Tracker and signal processing for the benchmark problem with unresolved targets. IEEE Trans Aerosp Electron Syst, 2006, 42: 279–300
Alan V O, Alan S W. Signals and Systems. 2nd ed. London: Prentice-Hall Inc., 1998
Richard C D, Robert H B. Modern Control Systems. 11th ed. London: Prentice-Hall Inc., 2007
Tenne D, Singh T. Analysis of α-β-γ filters. In: Proceedings of IEEE International Conference on Control Applications, Kohala Coast, HI, 1999. 1342–1347
Arulampalam S, Maskell S. A tutorial on particle filters for on-line non-linear/non-Gaussian Bayesian tracking. IEEE Trans Signal Process, 2002, 50: 174–188
Keith R. The delay/doppler radar altimeter. IEEE Trans Geosci Rem Sens, 1998, 36: 1578–1588
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Cui, W., Tian, J. & Wu, S. A tracking loop based on tightly coupled range and velocity filter equations. Sci. China Inf. Sci. 55, 898–910 (2012). https://doi.org/10.1007/s11432-012-4547-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11432-012-4547-1