
Abstract
Interventional surgery is widely used in the treatment of cardiovascular and cerebrovascular diseases, and the development of surgical robots can greatly reduce the fatigue and radiation risks brought to surgeons during surgery. In this paper, we present a novel interventional surgical robot which allows surgeons to fully use their operating skills during remote control. Fuzzy control theory is used to guarantee control precision during the master-slave operation. The safety force feedback control is designed based on the catheter and guidewire spring model, and the force-position control is designed to decrease the potential damage due to the control delay. This study first evaluates the force-position control strategy using a vascular model experiment, and then an in vivo experiment is used to evaluate the precision of the surgical robot controlling the catheter and guidewire to the designated position. The in vivo experiment results and surgeon’s feedback demonstrate that the proposed surgical robot is able to perform complex remote surgery in clinical application.

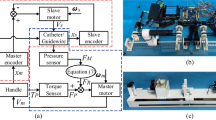
Surgeons perform remote interventional animal surgery using interventional surgical robots.











Similar content being viewed by others


References
Venketasubramanian N, Yoon BW, Pandian J, Navarro JC (2017) Stroke epidemiology in south, east, and south-east Asia: a review. J Stroke 19(3):286–294
Wang Y, Guo S, Tamiya T, Hirata H, Ishihara H, Yin X (2016) A virtual-reality simulator and force sensation combined catheter operation training system and its preliminary evaluation. Int J Med Robot Comput Assist Surg 13(3):e1769
Daneshmand M, Bilici O, Bolotnikova A, Anbarjafari G (2017) Medical robots with potential applications in participatory and opportunistic remote sensing: a review. Robot Auton Syst 95:160–180. https://doi.org/10.1016/j.robot.2017.06.009
Faddis M, Blume W, Finney J, Hall A, Rauch J, Sell J, Bae K, Talcott M, Lindsay B (2002) Novel, magnetically guided catheter for endocardial mapping and radiofrequency catheter ablation. Circulation 106(23):2980–2985
Carrozza J Jr (2012) Robotic-assisted percutaneous coronary intervention filling an unmet need. J Cardiovasc Transl Res 5(1):62–66
Kanagaratnam P, Koawing M, Wallace DT, Goldenberg AS, Davies DW (2008) Experience of robotic catheter ablation in humans using a novel remotely steerable catheter sheath. J Interv Card Electrophysiol 21(1):19–26
Riga C, Bicknell C, Rolls A, Cheshire N, Hamady M (2013) Robot-assisted fenestrated endovascular aneurysm repair (FEVAR) using the Magellan system. J Vasc Interv Radiol 24(2):191–196
Saliba W, Reddy VY, Wazni O et al (2008) Atrial fibrillation ablation using a robotic catheter remote control system: initial human experience and long-term follow-up results. J Am Coll Cardiol 51(25):2407–2411
Khan E, Frumkin W, Ng G, Neelagaru S, Abi-Samra F, Lee J, Giudici M, Gohn D, Winkle R, Sussman J, Knight B, Berman A, Calkins H (2013) First experience with a novel robotic remote catheter system: AmigoTM mapping trial. J Interv Card Electrophysiol 37(2):121–129
Guo S, Wang Y, Xiao N, Li Y, Jiang Y (2018) Study on real-time force feedback for a master–slave interventional surgical robotic system. Biomed Microdevices 20. https://doi.org/10.1007/s10544-018-0278-4
Guo J, Guo S, Yu Y (2016a) Design and characteristics evaluation of a novel teleoperated robotic catheterization system with force feedback for vascular interventional surgery. Biomed Microdevices 18(5):76
Guo J, Guo S (2016b) Design and characteristics evaluation of a novel VR-based robot-assisted catheterization training system with force feedback for vascular interventional surgery. Microsyst Technol 23:1–10
Guo J, Guo S, Tamiya T, Hirata H, Ishihara H (2016c) A virtual reality-based method of decreasing transmission time of visual feedback for a tele-operative robotic catheter operating system. Int J Med Robot 12(1):32–45
Zhang L, Guo S, Yu H, Song Y (2017) Performance evaluation of a strain-gauge force sensor for a haptic robot-assisted catheter operating system. Microsyst Technol 23(10):1–10
Zhang L, Guo S, Yu H, Song Y, Tamiya T, Hirata H, Ishihara H (2018) Design and performance evaluation of collision protection-based safety operation for a haptic robot-assisted catheter operating system. Biomed Microdevices 20. https://doi.org/10.1007/s10544-018-0266-8
Zhao Y, Guo S, Xiao N, Wang Y, Li Y, Jiang Y (2018) Operating force information on-line acquisition of a novel slave manipulator for vascular interventional surgery. Biomed Microdevices 20. https://doi.org/10.1007/s10544-018-0275-7
Park J, Choi J, Pak H, Song S, Lee J, Park Y, Shin S, Sun K (2010) Development of a force-reflecting robotic platform for cardiac catheter navigation. Artif Organs 34(11):1034–1039
W. Peng, N. Xiao, Y. Wang, C. Xu, G. Li (2016) The evaluation of a novel force feedback interventional surgery robotic system. In Proceedings of 2016 IEEE International Conference on Mechatronics and Automation 43–49
Yin X, Guo S, Hirata H, Ishihara H (2016a) Design and experimental evaluation of a teleoperated haptic robot–assisted catheter operating system. J Intell Mater Syst Struct 27(1):1–14
Chi W, Liu J, Rafii-Tari H, Riga C, Bicknell C, Yang G (2018) Learning-based endovascular navigation through the use of non-rigid registration for collaborative robotic catheterization. Int J Comput Assist Radiol Surg 13(6):855–864
X. Yin, S. Guo, N. Xiao, T. Tamiya, H. Hirata and. Ishihara, Safety operation consciousness realization of MR fluids-base novel haptic interface for teleoperated catheter minimally invasive neurosurgery. IEEE-ASME Trans Mechatron. 21(2), 1(2016b)
Bao X, Guo S, Xiao N, Li Y, Yang C, Jiang Y (2018a) A cooperation of catheters and guidewires-based novel remote-controlled vascular interventional robot. Biomed Microdevices 20. https://doi.org/10.1007/s10544-018-0261-0
Bao X, Guo S, Xiao N, Zhao Y, Zhang C, Yang C, Shen R (2017) Toward cooperation of catheter and guidewire for remote-controlled vascular interventional robot. IEEE ICMA:422–426
Elsayes KM, Oldham SAA (2014) Introduction to diagnostic radiology. McGraw-Hill Education, New York
Bao X, Guo S, Xiao N, Li Y, Yang C, Shen R, Cui J, Jiang Y, Liu X, Liu K (2018b) Operation evaluation in-human of a novel remote-controlled vascular interventional robot. Biomed Microdevices 20. https://doi.org/10.1007/s10544-018-0277-5
Bao X, Guo S, Xiao N, Wang Y, Qin M, Zhao Y, Xu C, Pen W (2016) Design and evaluation of a novel guidewire navigation robot. IEEE International Conference on Mechatronics and Automation:431–436
Ma X, Guo S, Xiao N, Guo J, Yoshida S, Tamiya T, Kawanishi M (2012) Development of a novel robotic catheter manipulating system with fuzzy PID control. IJIMR. 2(2):58–77
Shen H, Wang C, Xie L, Zhou S, Gu L, Xie H (2018) A novel remote-controlled robotic system for cerebrovascular intervention. Int J Med Robot Comput Assist Surg 14. https://doi.org/10.1002/rcs.1943
Funding
This research is partly supported by the National High-tech Research and Development Program (863 Program) of China (No.2015AA043202), and National Natural Science Foundation of China (61375094).
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Ethical approval
All applicable international, national, and/or institutional guidelines for the care and use of animals were followed.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
ESM 1
. (WMV 14295 kb)
Rights and permissions
About this article

Cite this article
Yang, C., Guo, S., Bao, X. et al. A vascular interventional surgical robot based on surgeon’s operating skills. Med Biol Eng Comput 57, 1999–2010 (2019). https://doi.org/10.1007/s11517-019-02016-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11517-019-02016-8