
Abstract
Introduction
Surgical and interventional procedures increasingly rely on spatial measurement systems. One of the most popular is NDI’s Polaris Vicra®. Unfortunately, this system cannot be used for magnetic resonance imaging (MRI) procedures because of the image artifacts that it produces.
Materials and methods
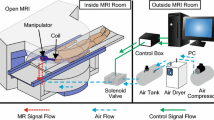
Here, a simple method for hardware electrical shielding is presented which makes the Polaris Vicra® MR-compatible for a low-field open-magnet MR scanner. The shielding is achieved by placing the cable linking the sensor to the USB converter inside a copper braid tube.
Results
Tests performed with a variety of MR sequences show the absence of image artifacts, image distortion or grey-level uniformity degradation. In the same way, 3D localization accuracy of the spatial measurement system is not modified by the MR environment. A rough safety check shows that the system does not pose hazards with normal condition of use.
Conclusion
This minor adaptation makes the system suitable for various applications in low field MR environments, such as intraoperative and interventional MRI.
Similar content being viewed by others

References
Moche M, Trampel R, Kahn T, Busse H (2008) Navigation concepts for MR image-guided interventions. J Magn Reson Imaging 27: 276–291. doi:10.1002/jmri.21262
Weis CR, Nour SG, Lewin JS (2008) MR-guided biopsy: a review of current techniques and applications. J Magn Reson Imaging 27: 311–325. doi:10.1002/jmri.21270
Elgort DR, Duerk JL (2005) A review of technical advances in interventional magnetic resonance imaging. Acad Radiol 12(9): 1089–1099. doi:10.1016/j.acra.2005.06.003
Viard R, Rousseau J (2008) Interventional MR imaging: state of the art and technological advances. J Radiol 89(1): 13–20. doi:10.1016/S0221-0363(08)70365-2
DiMaio S, Pieper S, Chinzei KG GF, Kikinis R (2004) Robot assisted percutaneous intervention in open-MRI. In: 5th Interventional MRI Symposium, Boston, October 15–16, Proceedings: 155
Krieger A, Fichtinger G, Metzger G, Atalar E, Whitcomb LL (2006) A hybrid method for 6-DOF tracking of MRI-compatible robotic interventional devices. IEEE International Conference on Robotics and Automation, pp 3844–3849
Elhawary H, Tse ZT, Hamed A, Rea M, Davies BL, Lamperth MU (2008) The case for MR-compatible robotics: a review of the state of the art. Int J Med Robot 4(2): 105–113. doi:10.1002/rcs.192
Zaitsev M, Dold C, Sakas G, Hennig G, Speck O (2006) Magnetic resonance imaging of freely moving objects: prospective real-time motion correction using an external optical motion tracking system. Neuroimage 31(3): 1038–1050. doi:10.1016/j.neuroimage.2006.01.039
Coste E, Occelli B, Gibon D, Daanen V, Rousseau J (1999) 3D localizer for surgical use: application to radiation field evaluation. EMBC’99. Proceedings 37(S2): 1110–1111
Wacker FK, Vogt S, Khamene A, Jesberger JA, Nour SG, Elgort DR et al (2006) An augmented reality system for MR image–guided needle biopsy: initial results in a swine model. Radiology 238: 497–504. doi:10.1148/radiol.2382041441
Viard R, Betrouni N, Rousseau J, Mordon S, Ernst O, Maouche S (2007) Needle positioning in interventional MRI procedure: real time optical localisation and accordance with the roadmap. IEEE EMBS 2007. 29th Annual International Conference of the IEEE, pp 2748–2751
Bourel P, Gibon D, Coste E, Daanen V, Rousseau J (1999) Automatic quality assessment protocol for MRI equipment. Med Phys 26(12): 2693–2700. doi:10.1118/1.598809
NEMA Determination of signal-to-noise ratio (SNR) in diagnostic magnetic resonance images (1988) Document MS1, National Electrical Manufacturers Association, Washington, DC
NEMA Determination of image uniformity in diagnostic magnetic resonance images (1989) Document MS3, National Electrical Manufacturers Association, Washington, DC
NEMA Determination of two dimensional geometric distortions in diagnostic magnetic resonance images (1989) Document MS2, National Electrical Manufacturers Association, Washington, DC
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Viard, R., Vermandel, M. & Rousseau, J. Setting up MR compatibility of a commercial stereo-localization system for low-field open MR interventional procedures. Int J CARS 4, 65–69 (2009). https://doi.org/10.1007/s11548-008-0274-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-008-0274-x