
Abstract
Purpose
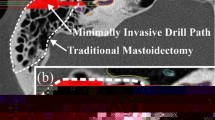
During guided drilling for minimally invasive cochlear implantation and related applications, typically forces and torques act on the employed tool guides, which result from both the surgeon’s interaction and the bone drilling process. Such loads propagate through the rigid mechanisms and result in deformations of compliant parts, which in turn affect the achievable accuracy. In this paper, the order of magnitude as well as the factors influencing such loads are studied experimentally to facilitate design and optimization of future drill guide prototypes.
Methods
The experimental setup to evaluate the occurring loads comprises two six degree of freedom force/torque sensors: one mounted between a manually operated, linearly guided drill handpiece and one below the specimens into which the drilling is carried out. This setup is used to analyze the influences of drilling tool geometry, spindle speed as well as experience of the operator on the resulting loads.
Results
The results reveal that using a spiral drill results in lower process loads compared with a surgical Lindemann mill. Moreover, in this study, an experienced surgeon applied lower interaction forces compared with untrained volunteers. The measured values further indicate that both the intraoperative handling of the bone-attached drill guide as well as the tool removal after completing the hole can be expected to cause temporary load peaks which exceed the values acquired during the drilling procedure itself.
Conclusions
The results obtained using the proposed experimental setup serve as realistic design criteria with respect to the development of future drill guide prototypes. Furthermore, the given values can be used to parameterize simulations for profound stiffness analyses of existing mechanisms.


















Similar content being viewed by others


References
Balachandran R, Mitchell JE, Blachon G, Noble JH, Dawant BM, Fitzpatrick JM, Labadie RF (2010) Percutaneous cochlear implant drilling via customized frames: an in vitro study. Otolaryngol Head Neck Surg 142(3):421–426. doi:10.1016/j.otohns.2009.11.029
Webster RJ, Dawant BM, Fitzpatrick JM, Labadie RF (2011) Insertion of electrode array using percutaneous cochlear implantation technique: a cadaveric study. In: Wong KH, Holmes DR III (eds) Medical imaging 2011: visualization, image-guided procedures, and modeling. SPIE - International Society for Optical Engineering, Bellingham, WA, p 79641E. doi:10.1117/12.878786
Bell B, Stieger C, Gerber N, Arnold A, Nauer C, Hamacher V, Kompis M, Nolte L, Caversaccio M, Weber S (2012) A self-developed and constructed robot for minimally invasive cochlear implantation. Acta Oto-Laryngol 132(4):355–360. doi:10.3109/00016489.2011.642813
Denkena B, Tönshoff HK (2011) Spanen: grundlagen, 3rd edn. Springer, Heidelberg
Dillon NP, Kratchman LB, Dietrich MS, Labadie RF, Webster RJ, Withrow TJ (2013) An experimental evaluation of the force requirements for robotic mastoidectomy. Otol Neurotol 34(7):93–102. doi:10.1097/MAO.0b013e318291c76b
Jacobs CH, Berry JT, Pope MH, Hoaglund FT (1976) A study of the bone machining process—drilling. J Biomech 9(5):343–349. doi:10.1016/0021-9290(76)90056-7
Klocke F, König W (2008) Fertigungsverfahren 1: Drehen, Fräsen, Bohren, 8th edn. Springer, Heidelberg
Kobler JP, Beckmann D, Rau T, Majdani O, Ortmaier T (2013) An automated insertion tool for cochlear implants with integrated force sensing capability. Int J CARS 9(3):481–494. doi:10.1007/s11548-013-0936-1
Kobler JP, Kotlarski J, Lexow GJ, Majdani O, Ortmaier T (2014) Design optimization of a bone-attached, redundant and reconfigurable parallel kinematic device for skull surgery. In: Proceedings of the 2014 IEEE International conference on robotics and automation (ICRA)
Kobler JP, Kotlarski J, Öltjen J, Baron S, Ortmaier T (2012) Design and analysis of a head-mounted parallel kinematic device for skull surgery. Int J CARS 7(1):137–149. doi:10.1007/s11548-011-0619-8
Kobler JP, Schoppe M, Lexow GJ, Rau TS, Majdani O, Kahrs LA, Ortmaier T (2014) Temporal bone borehole accuracy for cochlear implantation influenced by drilling strategy: an in vitro study. Int J CARS. doi:10.1007/s11548-014-0997-9
Kratchman LB, Blachon GS, Withrow TJ, Balachandran R, Labadie RF, Webster RJ (2011) Design of a bone-attached parallel robot for percutaneous cochlear implantation. IEEE Trans Biomed Eng 58(10):2904–2910. doi:10.1109/TBME.2011.2162512
Kratchman LB, Fitzpatrick JM (2013) Robotically-adjustable microstereotactic frames for image-guided neurosurgery. In: medical imaging 2013: image-guided procedures, robotic interventions, and modeling, vol. 8671, p 86711U. doi:10.1117/12.2008172
Labadie RF, Balachandran R, Mitchell J, Noble JH, Majdani O, Haynes D, Bennett M, Dawant BM, Fitzpatrick JM (2010) Clinical validation study of percutaneous cochlear access using patient-customized microstereotactic frames. Otol Neurotol 31(1):94. doi:10.1097/MAO.0b013e3181c2f81a
Labadie RF, Balachandran R, Noble JH, Blachon GS, Mitchell JE, Reda FA, Dawant BM, Fitzpatrick JM (2014) Minimally-invasive image-guided cochlear implantation surgery: first report of clinical implementation. Laryngoscope 124:1915–1922. doi:10.1002/lary.24520
Labadie RF, Choudhury P, Cetinkaya E, Balachandran R, Haynes DS, Fenlon M, Juscyzk S, Fitzpatrick JM (2005) Minimally-invasive, image-guided, facial-recess approach to the middle ear: demonstration of the concept of percutaneous cochlear access in vitro. Otol Neurotol 26:557–562
Lee J, Gozen BA, Ozdoganlar OB (2012) Modeling and experimentation of bone drilling forces. J Biomech 45(6):1076–1083. doi:10.1016/j.jbiomech.2011.12.012
Majdani O, Rau T, Baron S, Eilers H, Baier C, Heimann B, Ortmaier T, Bartling S, Lenarz T, Leinung M (2009) A robot-guided minimally invasive approach for cochlear implant surgery: preliminary results of a temporal bone study. Int J CARS 4:475–486. doi:10.1007/s11548-009-0360-8
McElhaney JH, Fogle JL, Melvin JW, Haynes RR, Roberts VL, Alem NM (1970) Mechanical properties of cranial bone. J Biomech 3(5):495–511. doi:10.1016/0021-9290(70)90059-X
McRackan TR, Balachandran R, Blachon GS, Mitchell JE, Noble JH, Wright CG, Fitzpatrick JM, Dawant BM, Labadie RF (2013) Validation of minimally invasive, image-guided cochlear implantation using advanced bionics, cochlear, and medel electrodes in a cadaver model. Int J CARS 8(6):989–995. doi:10.1007/s11548-013-0842-6
Oberg E (2012) Machinery’s handbook, 29th edn. Industrial Press, New York
Peterson J, Dechow PC (2002) Material properties of the inner and outer cortical tables of the human parietal bone. Anat Rec 268(1):7–15. doi:10.1002/ar.10131
Peterson J, Dechow PC (2003) Material properties of the human cranial vault and zygoma. Anat Rec A Discov Mol Cell Evol Biol 274(1):785–797. doi:10.1002/ar.a.10096
Schipper J, Aschendorff A, Arapakis I, Klenzner T, Teszler CB, Ridder GJ, Laszig R (2004) Navigation as a quality management tool in cochlear implant surgery. J Laryngol Otol 118:764–770. doi:10.1258/0022215042450643
Schweighoefer G (2007) Method for making a deep hole and a pilot drill therefor. WO Patent App. PCT/EP2007/050407
Udiljak T, Ciglar D, Skoric S (2007) Investigation into bone drilling and thermal bone necrosis. Adv Prod Eng Manag 2(3):103–112
Ueda T, Wada A, Hasegawa KI, Endo Y, Takikawa Y, Hasegawa T, Hara T (2010) Design optimization of surgical drills using the Taguchi method. J Biomech Sci Eng 5:603–614
Warren FM, Balachandran R, Fitzpatrick JM, Labadie RF (2007) Percutaneous cochlear access using bone-mounted, customized drill guides: demonstration of concept in vitro. Otol Neurotol 28(3):325–329. doi:10.1097/01.mao.0000253287.86737.2e
Wiggins KL, Malkin S (1976) Drilling of bone. J Biomech 9:553–559
Williamson T, Bell B, Gerber N, Salas L, Zysset P, Caversaccio M, Weber S (2013) Estimation of tool pose based on force-density correlation during robotic drilling. IEEE Trans Biomed Eng 60(4):969–976. doi:10.1109/TBME.2012.2235439
Wood JL (1971) Dynamic response of human cranial bone. J Biomech 4(1):1–12
Yang Y, Wang C, Qin Z, Xu L, Song Y, Chen H (2010) Drilling force and temperature of bone by surgical drill. Adv Mater Res 126–128:779–784. doi:10.4028/www.scientific.net/AMR.126-128.779
Acknowledgments
The authors would like to thank Thomas S. Rau for his advice in the preparation of this study. This work was funded by the German Research Foundation (DFG). The project numbers are OR 196/10-1 and MA 4038/6-1. Responsibility for the contents of this publication lies with the authors.
Conflict of interest
Jan-Philipp Kobler, Sergej Wall, G. Jakob Lexow, Carl Philipp Lang, Omid Majdani, Lüder A. Kahrs and Tobias Ortmaier declare that they have no conflict of interest.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Kobler, JP., Wall, S., Lexow, G.J. et al. An experimental evaluation of loads occurring during guided drilling for cochlear implantation. Int J CARS 10, 1625–1637 (2015). https://doi.org/10.1007/s11548-015-1153-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-015-1153-x