
Abstract
Purpose
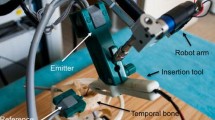
Minimally invasive cochlear implantation is a novel surgical technique which requires highly accurate guidance of a drilling tool along a trajectory from the mastoid surface toward the basal turn of the cochlea. The authors propose a passive, reconfigurable, parallel robot which can be directly attached to bone anchors implanted in a patient’s skull, avoiding the need for surgical tracking systems. Prior to clinical trials, methods are necessary to patient specifically optimize the configuration of the mechanism with respect to accuracy and stability. Furthermore, the achievable accuracy has to be determined experimentally.
Methods
A comprehensive error model of the proposed mechanism is established, taking into account all relevant error sources identified in previous studies. Two optimization criteria to exploit the given task redundancy and reconfigurability of the passive robot are derived from the model. The achievable accuracy of the optimized robot configurations is first estimated with the help of a Monte Carlo simulation approach and finally evaluated in drilling experiments using synthetic temporal bone specimen.
Results
Experimental results demonstrate that the bone-attached mechanism exhibits a mean targeting accuracy of \((0.36\pm 0.12)\) mm under realistic conditions. A systematic targeting error is observed, which indicates that accurate identification of the passive robot’s kinematic parameters could further reduce deviations from planned drill trajectories.
Conclusion
The accuracy of the proposed mechanism demonstrates its suitability for minimally invasive cochlear implantation. Future work will focus on further evaluation experiments on temporal bone specimen.









Similar content being viewed by others


References
Balachandran R, Mitchell JE, Blachon G, Noble JH, Dawant BM, Fitzpatrick JM, Labadie RF (2010) Percutaneous cochlear implant drilling via customized frames: an in vitro study. Otolaryngol Head Neck Surg 142(3):421–426. doi:10.1016/j.otohns.2009.11.029
Baron S, Eilers H, Munske B, Toennies JL, Balachandran R, Labadie RF, Ortmaier T, Webster RJ (2010) Percutaneous inner-ear access via an image-guided industrial robot system. Proc Inst Mech Eng Part H J Eng Med 224(5):633–649. doi:10.1243/09544119JEIM781
Bell B, Gerber N, Williamson T, Gavaghan K, Wimmer W, Caversaccio M, Weber S (2013) In vitro accuracy evaluation of image-guided robot system for direct cochlear access. Otol Neurotol 34(7):1284–1290. doi:10.1097/MAO.0b013e31829561b6
Bell B, Stieger C, Gerber N, Arnold A, Nauer C, Hamacher V, Kompis M, Nolte L, Caversaccio M, Weber S (2012) A self-developed and constructed robot for minimally invasive cochlear implantation. Acta Oto-Laryngol 132(4):355–360. doi:10.3109/00016489.2011.642813
Eilers H, Baron S, Ortmaier T, Heimann B, Baier C, Rau TS, Leinung M, Majdani O (2009) Navigated, robot assisted drilling of a minimally invasive cochlear access. In: Proceedings of the 2009 IEEE international conference on mechatronics. IEEE, Mlaga, Spain. doi:10.1109/ICMECH.2009.4957213
Fitzpatrick J, West J, Maurer CR Jr (1998) Predicting error in rigid-body point-based registration. IEEE Trans Med Imaging 17(5):694–702. doi:10.1109/42.736021
Fitzpatrick JM (2009) Fiducial registration error and target registration error are uncorrelated. In: Proceedings of the SPIE 7261, medical imaging, pp 726, 102–726, 102–112
Gosselin CM, Angeles J (1990) Singularity analysis of closed-loop kinematic chains. IEEE Trans Robot Autom 6(3):281–290
Kobler JP, Díaz Díaz J, Fitzpatrick JM, Lexow GJ, Majdani O, Ortmaier T (2014) Localization accuracy of sphere fiducials in computed tomography images. In: Proceedings of the SPIE 9036, medical imaging 2014: image-guided procedures, robotic interventions, and modeling, vol 9036. doi:10.1117/12.2043472
Kobler JP, Kotlarski J, Lexow GJ, Majdani O, Ortmaier T (2014) Design optimization of a bone-attached, redundant and reconfigurable parallel kinematic device for skull surgery. In: Proceedings of the 2014 IEEE international conference on robotics and automation (ICRA), pp 2364–2371. doi:10.1109/ICRA.2014.6907187
Kobler JP, Kotlarski J, Öltjen J, Baron S, Ortmaier T (2012) Design and analysis of a head-mounted parallel kinematic device for skull surgery. Int J CARS 7(1):137–149. doi:10.1007/s11548-011-0619-8
Kobler JP, Prielozny L, Lexow GJ, Rau TS, Majdani O, Ortmaier T (2015) Mechanical characterization of bone anchors used with a bone-attached, parallel robot for skull surgery. Med Eng Phys 37(5):460–468. doi:10.1016/j.medengphy.2015.02.012
Kobler JP, Schoppe M, Lexow GJ, Rau TS, Majdani O, Kahrs LA, Ortmaier T (2014) Temporal bone borehole accuracy for cochlear implantation influenced by drilling strategy: an in vitro study. Int J Comput Assist Radiol Surg 9(6):1033–1043. doi:10.1007/s11548-014-0997-9
Kobler JP, Wall S, Lexow GJ, Lang CP, Majdani O, Kahrs LA, Ortmaier T (2015) An experimental evaluation of loads occurring during guided drilling for cochlear implantation. Int J Comput Assist Radiol Surg. doi:10.1007/s11548-015-1153-x
Kratchman LB, Blachon GS, Withrow TJ, Balachandran R, Labadie RF, Webster RJ (2011) Design of a bone-attached parallel robot for percutaneous cochlear implantation. IEEE Trans Biomed Eng 58(10):2904–2910. doi:10.1109/TBME.2011.2162512
Kratchman LB, Fitzpatrick JM (2013) Robotically-adjustable microstereotactic frames for image-guided neurosurgery. In: Medical imaging 2013: image-guided procedures, robotic interventions, and modeling, vol 8671, p 86711U. doi:10.1117/12.2008172
Kumar V (1992) Algorithms for constraint-satisfaction problems: a survey. AI Mag 13(1):32–44
Labadie RF, Balachandran R, Mitchell J, Noble JH, Majdani O, Haynes D, Bennett M, Dawant BM, Fitzpatrick JM (2010) Clinical validation study of percutaneous cochlear access using patient-customized microstereotactic frames. Otol Neurotol 31(1):94. doi:10.1097/MAO.0b013e3181c2f81a
Labadie RF, Balachandran R, Noble JH, Blachon GS, Mitchell JE, Reda FA, Dawant BM, Fitzpatrick JM (2014) Minimally-invasive, image-guided cochlear implantation surgery: first report of clinical implementation. The Laryngoscope 124(8):1915–1922. doi:10.1002/lary.24520
Majdani O, Rau T, Baron S, Eilers H, Baier C, Heimann B, Ortmaier T, Bartling S, Lenarz T, Leinung M (2009) A robot-guided minimally invasive approach for cochlear implant surgery: preliminary results of a temporal bone study. Int J CARS 4:475–486. doi:10.1007/s11548-009-0360-8
McRackan TR, Balachandran R, Blachon GS, Mitchell JE, Noble JH, Wright CG, Fitzpatrick JM, Dawant BM, Labadie RF (2013) Validation of minimally invasive, image-guided cochlear implantation using advanced bionics, cochlear, and medel electrodes in a cadaver model. Int J CARS 8(6):989–995. doi:10.1007/s11548-013-0842-6
Merlet JP (1994) Determination of the workspace of a parallel manipulator for a fixed orientation. Mech Mach Theory 29(8):1099–1113. doi:10.1016/0094-114X(94)90002-7
Merlet JP (2006) Computing the worst case accuracy of a PKM over a workspace or a trajectory. In: Proceedings of the 5th chemnitz parallel kinematics seminar, pp 83–96
Merlet JP (2006) Parallel robots, 2nd edn. Springer, Dordrecht
Nocedal J, Wright SJ (2006) Numerical optimization. Springer, New York
Patel AJ, Ehmann KF (1997) Volumetric error analysis of a Stewart platform-based machine tool. CIRP Ann Manuf Technol 46(1):287–290. doi:10.1016/S0007-8506(07)60827-0
Raghavan M (1993) The stewart platform of general geometry has 40 configurations. J Mech Des 115(2):277–282
Rau TS, Kluge M, Prielozny L, Kobler JP, Lenarz T, Majdani O (2013) Auf dem Weg zur klinischen Anwendung: Eine Weiterentwicklung des automatisierten Insertionstools für Cochlea-Implantate. In: Tagungsband der 12. Jahrestagung der Deutschen Gesellschaft für Computer- und Roboterassistierte Chirurgie e.V. (CURAC). Freysinger, W, pp 41–45
Ropponen T, Arai T (1995) Accuracy analysis of a modified stewart platform manipulator. Proc IEEE Int Conf Robot Autom 1:521–525. doi:10.1109/ROBOT.1995.525336
Ryu J, Cha J (2003) Volumetric error analysis and architecture optimization for accuracy of hexaslide type parallel manipulators. Mech Mach Theory 38(3):227–240. doi:10.1016/S0094-114X(02)00126-X
Schipper J, Aschendorff A, Arapakis I, Klenzner T, Teszler CB, Ridder GJ, Laszig R (2004) Navigation as a quality management tool in cochlear implant surgery. J Laryngol Otol 118:764–770. doi:10.1258/0022215042450643
Warren FM, Balachandran R, Fitzpatrick JM, Labadie RF (2007) Percutaneous cochlear access using bone-mounted, customized drill guides: demonstration of concept in vitro. Otol Neurotol 28(3):325–329. doi:10.1097/01.mao.0000253287.86737.2e
Acknowledgments
This work was funded by the German Research Foundation (DFG). The project numbers are OR 196/10-1 and MA 4038/6-1. Responsibility for the contents of this publication lies with the authors.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
Jan-Philipp Kobler, Kathrin Nuelle, G. Jakob Lexow, Thomas S. Rau, Omid Majdani, Lueder A. Kahrs, Jens Kotlarski, and Tobias Ortmaier declare that they have no conflict of interest.
Human and animal rights
This article does not contain any studies with human participants or animals performed by any of the authors.
Rights and permissions
About this article

Cite this article
Kobler, JP., Nuelle, K., Lexow, G.J. et al. Configuration optimization and experimental accuracy evaluation of a bone-attached, parallel robot for skull surgery. Int J CARS 11, 421–436 (2016). https://doi.org/10.1007/s11548-015-1300-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-015-1300-4